Control of DC Motor Using Integral State Feedback and Comparison with PID: Simulation and Arduino Implementation
DOI:
https://doi.org/10.18196/jrc.25122Keywords:
DC motor, Arduino, Integral State Feedback, Angular Speed, PID ControllerAbstract
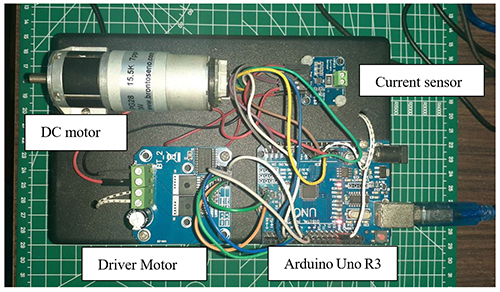
The Direct Current (DC) motor is widely applied in various implementations. The main problem in the DC motor is controlling the angular speed on the specific reference. This research then proposed an integral state feedback design for tracking control in DC motor, with Simulink Matlab simulation and the Arduino hardware implementation. The results will be compared with the implementation of the PID controller. The integral state feedback controller can handle the system to reach the setpoint with good performance in the simulations, even with changing different poles and setpoints. In the hardware implementation, the current sensor (INA219) and encoder sensor are used since all state variables need to be calculated. Based on the result, the controller can reach the setpoint stably with oscillation. Similar results are showed in simulations with different setpoints. Compared with the PID Controller, the integral state feedback controller has a better response with faster rise time and faster settling time.
References
J. Chotai and K. Narwekar, “Modelling and position control of brushed DC motor,” in International Conference on Advances in Computing, Communication and Control 2017, ICAC3 2017, 2018, vol. 2018-January, pp. 1–5.
P. Kumar, S. Chatterjee, D. Shah, U. K. Saha, and S. Chatterjee, “On comparison of tuning method of FOPID controller for controlling field controlled DC servo motor,” Cogent Engineering, vol. 4, no. 1, Jul. 2017.
A. S. Shekhawat and Y. Rohilla, “Design and Control of Two-wheeled Self-Balancing Robot using Arduino,” in Proceedings - International Conference on Smart Electronics and Communication, ICOSEC 2020, 2020, pp. 1025–1030.
S. Shekhar, P. K. Saha, and P. R. Thakura, “Optimal pid tuning of bldc drive using lqr technique,” in Proceedings - 2019 IEEE International Conference on Intelligent Systems and Green Technology, ICISGT 2019, 2019, pp. 57–61.
C. F. Hsu, C. T. Su, W. F. Kao, and B. K. Lee, “Vision-Based Line-Following Control of a Two-Wheel Self-Balancing Robot,” in Proceedings - International Conference on Machine Learning and Cybernetics, 2018, vol. 1, pp. 319–324.
H. S. Juang and K. Y. Lurrr, “Design and control of a two-wheel self-balancing robot using the arduino microcontroller board,” in IEEE International Conference on Control and Automation, ICCA, 2013, pp. 634–639.
S. Tayal, H. P. G. Rao, S. Bhardwaj, and H. Aggarwal, “Line Follower Robot: Design and Hardware Application,” in ICRITO 2020 - IEEE 8th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions), 2020, pp. 10–13.
S. Saadatmand, S. Azizi, M. Kavousi, and D. Wunsch, “Autonomous Control of a Line Follower Robot Using a Q-Learning Controller,” in 2020 10th Annual Computing and Communication Workshop and Conference, CCWC 2020, 2020, pp. 556–561.
R. Covaci, G. Harja, and I. Nascu, “Autonomous Maze Solving Robot,” in 2020 22nd IEEE International Conference on Automation, Quality and Testing, Robotics - THETA, AQTR 2020 - Proceedings, 2020.
Y. Shao and J. Li, “Modeling and Switching Tracking Control for a Class of Cart-Pendulum Systems Driven by DC Motor,” IEEE Access, vol. 8, pp. 44858–44866, 2020.
V. M. Hernandez-Guzman, M. Antonio-Cruz, and R. Silva-Ortigoza, “Linear state feedback regulation of a furuta pendulum: Design based on differential flatness and root locus,” IEEE Access, vol. 4, pp. 8721–8736, 2016.
M. A. Hassanin, F. E. Abdel-Kader, S. I. Amer, and A. E. Abu-Moubarka, “Operation of Brushless DC Motor to Drive the Electric Vehicle,” in 2018 20th International Middle East Power Systems Conference, MEPCON 2018 - Proceedings, 2019, pp. 500–503.
D. U. Thakar and R. A. Patel, “Comparison of Advance and Conventional Motors for Electric Vehicle Application,” in 2019 3rd International Conference on Recent Developments in Control, Automation and Power Engineering, RDCAPE 2019, 2019, pp. 137–142.
W. J. Tang and S. Y. Cao, “A Fast Realization Method of Fuzzy PID Control for DC Motor,” in Chinese Control Conference, CCC, 2018, vol. 2018-July, pp. 5131–5135.
A. Jaya, E. Purwanto, M. B. Fauziah, F. D. Murdianto, G. Prabowo, and M. R. Rusli, “Design of PID-fuzzy for speed control of brushless DC motor in dynamic electric vehicle to improve steady-state performance,” in Proceedings IES-ETA 2017 - International Electronics Symposium on Engineering Technology and Applications, 2017, vol. 2017-Decem, pp. 179–184.
S. Zhang, W. Gu, Y. Hu, J. Du, and H. Chen, “Angular speed control of brushed DC motor using nonlinear method: Design and experiment,” in Chinese Control Conference, CCC, 2016, vol. 2016-Augus, pp. 1045–1050.
M. A. Taut, G. Chindris, and D. Piticǎ, “PID Algorithm used for DC Motor Control,” in 2018 IEEE 24th International Symposium for Design and Technology in Electronic Packaging, SIITME 2018 - Proceedings, 2019, pp. 365–372.
S. Chaouch et al., “DC-Motor Control Using Arduino-Uno Board for Wire-Feed System,” in Proceedings of 2018 3rd International Conference on Electrical Sciences and Technologies in Maghreb, CISTEM 2018, 2019.
G. Gasparesc, “PID control of a DC motor using Labview Interface for Embedded Platforms,” in 2016 12th International Symposium on Electronics and Telecommunications, ISETC 2016 - Conference Proceedings, 2016, pp. 145–148.
Z. Adel, A. A. Hamou, and S. Abdellatif, “Design of Real-Time PID tracking controller using Arduino Mega 2560for a permanent magnet DC motor under real disturbances.,” in Proceedings of 2018 3rd International Conference on Electrical Sciences and Technologies in Maghreb, CISTEM 2018, 2019.
Y. Guo and M. E. A. Mohamed, “Speed Control of Direct Current Motor Using ANFIS Based Hybrid P-I-D Configuration Controller,” IEEE Access, vol. 8, pp. 125638–125647, 2020.
B. Hekimoglu, “Optimal Tuning of Fractional Order PID Controller for DC Motor Speed Control via Chaotic Atom Search Optimization Algorithm,” IEEE Access, vol. 7, pp. 38100–38114, 2019.
Z. Tir, O. Malik, M. A. Hamida, H. Cherif, Y. Bekakra, and A. Kadrine, “Implementation of a fuzzy logic speed controller for a permanent magnet dc motor using a low-cost Arduino platform,” in 2017 5th International Conference on Electrical Engineering - Boumerdes, ICEE-B 2017, 2017, vol. 2017-January, pp. 1–4.
Munadi, M. A. Akbar, T. Naniwa, and Y. Taniai, “Model Reference Adaptive Control for DC motor based on Simulink,” in Proceedings - 2016 6th International Annual Engineering Seminar, InAES 2016, 2017, pp. 101–106.
M. Ahmad, A. Khan, M. A. Raza, and S. Ullah, “A study of state feedback controllers for pole placement,” in 5th International Multi-Topic ICT Conference: Technologies For Future Generations, IMTIC 2018 - Proceedings, 2018.
D. Somwanshi, M. Bundele, G. Kumar, and G. Parashar, “Comparison of fuzzy-PID and PID controller for speed control of DC motor using LabVIEW,” in Procedia Computer Science, 2019, vol. 152, pp. 252–260.
A. Varshney, D. Gupta, and B. Dwivedi, “Speed response of brushless DC motor using fuzzy PID controller under varying load condition,” Journal of Electrical Systems and Information Technology, vol. 4, no. 2, pp. 310–321, Sep. 2017.
A. Ma’arif, H. Nabila, Iswanto, and O. Wahyunggoro, “Application of Intelligent Search Algorithms in Proportional-Integral-Derivative Control of Direct-Current Motor System,” in The 2019 Conference on Fundamental and Applied Science for Advanced Technology, 2019, vol. 1373, no. 1, pp. 1–10.
A. Apte, V. A. Joshi, H. Mehta, and R. Walambe, “Disturbance-Observer-Based Sensorless Control of PMSM Using Integral State Feedback Controller,” IEEE Transactions on Power Electronics, vol. 35, no. 6, pp. 6082–6090, Jun. 2020.
J. J. V. Sanjuan, R. J. M. Contreras, E. Y. Mendoza, J. L. Flores, R. O. Bravo, and M. E. Tlaxcaltecatl, “Design and Modeling of Integral Control State-feedback Controller for PMSM,” in 2018 15th International Conference on Electrical Engineering, Computing Science and Automatic Control, CCE 2018, 2018.
M. A. M. Cheema, J. E. Fletcher, D. Xiao, and M. F. Rahman, “A Linear Quadratic Regulator-Based Optimal Direct Thrust Force Control of Linear Permanent-Magnet Synchronous Motor,” IEEE Transactions on Industrial Electronics, vol. 63, no. 5, pp. 2722–2733, 2016.
D. H. Kim, T. H. Nguyen, P. S. Pratama, H. K. Kim, Y. S. Jung, and S. B. Kim, “Servo system design for speed control of AC induction motors using polynomial differential operator,” International Journal of Control, Automation and Systems, vol. 15, no. 3, pp. 1207–1216, Jun. 2017.
M. Hammouche, A. Mohand-Ousaid, P. Lutz, and M. Rakotondrabe, “Robust Interval Luenberger Observer-Based State Feedback Control: Application to a Multi-DOF Micropositioner,” IEEE Transactions on Control Systems Technology, vol. 27, no. 6, pp. 2672–2679, 2019.
P. Roy, B. Kar, A. Kumar, and B. K. Roy, “Level control of two tank system by fractional order integral state feedback controller tuned by PSO with experimental validation,” in 2016 IEEE 1st International Conference on Control, Measurement and Instrumentation, CMI 2016, 2016, pp. 224–228.
A. Samir, A. Hammad, A. Hafez, and H. Mansour, “Quadcopter Trajectory Tracking Control using State-Feedback Control with Integral Action,” International Journal of Computer Applications, vol. 168, no. 9, pp. 1–7, Jun. 2017.
M. Hypiusova, D. Rosinova, and A. Kozakova, “Comparison of State Feedback Controllers for the Magnetic Levitation System,” in 2020 Cybernetics & Informatics (K&I), 2020, pp. 1–6.
I. Iswanto and A. Maarif, “Robust Integral State Feedback Using Coefficient Diagram in Magnetic Levitation System,” IEEE Access, vol. 8, pp. 57003–57011, Mar. 2020.
Z. R. Labidi, H. Schulte, and A. Mami, “A Systematic Controller Design for a Photovoltaic Generator with Boost Converter Using Integral State Feedback Control,” Engineering, Technology & Applied Science Research, vol. 9, no. 2, pp. 4030–4036, Apr. 2019.
K. G. Shankar, D. Jena, and R. Reddivari, “Comparative Overview of Internal Model Control Based PID, State Feedback Integral, and Sliding Mode Controllers for Buck Converter,” in 2019 IEEE International Conference on Distributed Computing, VLSI, Electrical Circuits and Robotics, DISCOVER 2019 - Proceedings, 2019.
S. Abdelmalek, A. Dali, and M. Bettayeb, “An Improved Observer-based Integral State Feedback (OISF) Control Strategy of Flyback Converter for Photovoltaic Systems,” in Proceedings of 2018 3rd International Conference on Electrical Sciences and Technologies in Maghreb, CISTEM 2018, 2019.
S. M. Sousa, V. J. S. Leite, S. W. Fernandes, and I. R. H. Oliveira, “SEPIC DC/DC converter control by observed-state feedback,” in 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference, COBEP/SPEC 2019, 2019.
O. Saleem and K. Mahmood-Ul-Hasan, “Indirect Adaptive State-Feedback Control of Rotary Inverted Pendulum Using Self-Mutating Hyperbolic-Functions for Online Cost Variation,” IEEE Access, vol. 8, pp. 91236–91247, 2020.
M. Haemers, S. Derammelaere, C. M. Ionescu, K. Stockman, J. De Viaene, and F. Verbelen, “Proportional-Integral State-Feedback Controller Optimization for a Full-Car Active Suspension Setup using a Genetic Algorithm,” IFAC-PapersOnLine, vol. 51, no. 4, pp. 1–6, Jan. 2018.
C. Cui, K. Song, C. Zhu, Q. Zhang, Y. Liu, and S. Dong, “State Feedback Controller Design of Dynamic Wireless Power Transfer System,” in 2018 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer, Wow 2018, 2018.
S. J. Yoon, N. B. Lai, and K. H. Kim, “A Systematic Controller Design for a Grid-Connected Inverter with LCL Filter Using a Discrete-Time Integral State Feedback Control and State Observer,” Energies, vol. 11, no. 2, p. 437, Feb. 2018.
K. S. Pawar, M. V. Palwe, S. B. Ellath, and S. Y. Sondkar, “Comparison of Performance of PID Controller and State Feedback Controller for Flow Control Loop,” in Proceedings - 2018 4th International Conference on Computing, Communication Control and Automation, ICCUBEA 2018, 2018.
K. K. Patri and S. Samanta, “State feedback with integral control for boost converter & its microcontroller implementation,” in 2018 IEEMA Engineer Infinite Conference, eTechNxT 2018, 2018, pp. 1–5.
S. H. Hussein and M. A. A. Al-Rawe, “Real Time Speed Control of the DC Motor in LABVIEW,” in 2020 7th International Conference on Electrical and Electronics Engineering, ICEEE 2020, 2020, pp. 137–141.
W. J. Tang, Z. T. Liu, and Q. Wang, “DC motor speed control based on system identification and PID auto tuning,” in Chinese Control Conference, 2017, pp. 6420–6423.
L. Giuntini, “Full state feedback control of buck-type PWM rectifier,” in 2019 21st European Conference on Power Electronics and Applications, EPE 2019 ECCE Europe, 2019.
D. M. Soares, H. A. M. Calil, and R. M. Stephan, “Cascade Control vs Full-State Feedback,” in 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference, COBEP/SPEC 2019, 2019.
E. Asa and Y. Yamamoto, “CDM based Controller design for Stabilizing the Altitude and Heading of an Aircraft,” in Proceedings of the IEEE 2019 9th International Conference on Cybernetics and Intelligent Systems and Robotics, Automation and Mechatronics, CIS and RAM 2019, 2019, pp. 119–123.
E. Asa, Y. Yamamoto, and T. Benjanarasuth, “Aircraft Altitude Control Based on CDM,” in 2019 IEEE 2nd International Conference on Information and Computer Technologies, ICICT 2019, 2019, pp. 266–269.
E. Asa and Y. Yamamoto, “Aircraft Heading Hold Control Based on CDM,” in International Conference on Control, Automation and Systems, 2019, vol. 2019-October, pp. 247–250.
T. H. Nguyen, D. H. Kim, S. J. Oh, H. K. Kim, and S. B. Kim, “Controller design for MIMO servo system using polynomial differential operator - A solution for increasing speed of an induction conveyor system,” in Lecture Notes in Electrical Engineering, 2017, vol. 415 LNEE, pp. 529–542.
D. H. Kim et al., “Application of servo controller design for speed control of AC induction motors using polynomial differential operator,” in Lecture Notes in Electrical Engineering, 2016, vol. 371, pp. 337–352.
S. B. Kim et al., “MIMO robust servo controller design based on internal model principle using polynomial differential operator,” in Lecture Notes in Electrical Engineering, 2016, vol. 371, pp. 469–484.
A. Ma’arif, Iswanto, N. M. Raharja, P. Aditya Rosyady, A. R. Cahya Baswara, and A. Anggari Nuryono, “Control of DC Motor Using Proportional Integral Derivative (PID): Arduino Hardware Implementation,” in 2020 2nd International Conference on Industrial Electrical and Electronics (ICIEE), 2020, pp. 74–78.
Iswanto, A. Ma’arif, R. D. Puriyanto, N. M. Raharja, and S. N. Rahmadhia, “Arduino Embedded Control System of DC Motor Using Proportional Integral Derivative,” International Journal of Control and Automation, vol. 13, no. 4, pp. 658–667, 2020.
L. Angel, J. Viola, and M. Vega, “Hardware in the loop experimental validation of PID controllers tuned by genetic algorithms,” in 4th IEEE Colombian Conference on Automatic Control: Automatic Control as Key Support of Industrial Productivity, CCAC 2019 - Proceedings, 2019.
S. J. Hammoodi, K. S. Flayyih, and A. R. Hamad, “Design and implementation speed control system of DC motor based on PID control and matlab simulink,” International Journal of Power Electronics and Drive Systems, vol. 11, no. 1, pp. 127–134, 2020.
Y. Naung, A. Schagin, H. L. Oo, K. Z. Ye, and Z. M. Khaing, “Implementation of data driven control system of DC motor by using system identification process,” in Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2018, 2018, vol. 2018-Janua, pp. 1801–1804.
R. K. Achanta and V. K. Pamula, “DC motor speed control using PID controller tuned by jaya optimization algorithm,” in IEEE International Conference on Power, Control, Signals and Instrumentation Engineering, 2018, pp. 983–987.
D. Maddi, A. Sheta, D. Davineni, and H. Al-Hiary, “Optimization of PID Controller Gain Using Evolutionary Algorithm and Swarm Intelligence,” in 2019 10th International Conference on Information and Communication Systems, ICICS 2019, 2019, pp. 199–204.
M. M. Maung, M. M. Latt, and C. M. Nwe, “DC Motor Angular Position Control using PID Controller with Friction Compensation,” International Journal of Scientific and Research Publications (IJSRP), vol. 8, no. 11, pp. 149–155, 2018.
S. A. Hamoodi, I. I. Sheet, and R. A. Mohammed, “A Comparison between PID controller and ANN controller for speed control of DC Motor,” in 2nd International Conference on Electrical, Communication, Computer, Power and Control Engineering, ICECCPCE 2019, 2019, pp. 221–224.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
