Journal of Robotics and Control (JRC) p-ISSN: 2715-5056, e-ISSN: 2715-5072 is an international peer-review open-access journal published bi-monthly, six times a year by Universitas Muhammadiyah Yogyakarta in collaboration with Peneliti Teknologi Teknik Indonesia. The Journal of Robotics and Control (JRC) invites scientists and engineers worldwide to exchange and disseminate theoretical and practice-oriented topics of development and advances in robotics and control within the whole spectrum of robotics and control. Journal of Robotics and Control (JRC) has been indexed by SCOPUS and is available in SCIMAGO.
| Journal title | Journal of Robotics and Control (JRC) |
| Abbreviation | JRC |
| Frequency | 6 issues per year |
| Type of Review | Double Blind Review |
| Print ISSN | 2715-5056 |
| Online ISSN | 2715-5072 |
| Editor | See Editor |
| Publisher | Universitas Muhammadiyah Yogyakarta, in collaboration with Peneliti Teknologi Teknik Indonesia (PTTI) |
| Organizer | Peneliti Teknologi Teknik Indonesia (PTTI) |
| Citation Analysis | Google Scholar | Scopus | Dimensions | Scimago | Web of Science |
| Abstracting & Indexing | EBSCO |
| Digital Marketing | Direct Email | Youtube Channel | Instagram | Twitter |
| Time to First Decision | Review Time | Publication Time |
|---|---|---|
| 2-4 Weeks | 4-8 weeks | 2-4 Weeks |
|
6.5 2024CiteScore
77th percentile
Powered by

|
|
Submit the paper through Online Submission Only LOG IN or REGISTRATION. Don't forget to check the author section tick when registering, or if you forget, please change in my profile menu or contact the available contact.
Kindly please download the Journal Article Template here: DOCX or LATEX.
Registration and login are required to submit items online and check the current submissions' status. Submitted manuscripts must never have been published before. In writing an English script, you must use the correct grammar rules. For further information, please contact jrcofumy@gmail.com.
Focus and Scope
Journal of Robotics and Control (JRC) aims to become the leading-edge, most comprehensive, and most reliable source of theoretical and practice-oriented research information in discoveries, innovations, and inventions of robotics and control systems. JRC considers robots’ motion and control are equally essential and interdependently support each other.
Published papers are original manuscripts that either modify, implement, or design in one or more aspects of robotic’s motion and control.
The topic of published papers might be subject to one or more of the following scopes:
Autonomous robots. Autonomous robots are intelligent machines capable of performing one or several tasks by themselves, without direct human control or force as an external influence. Topics from this scope may vary from implementation to control of robots’ manipulation, navigation, mapping, and vision. Practice-oriented research may take cases of flying robots, mobile robots, humanoid robots, underwater robots, industrial robots, etc.
Robotics modeling and design. Topics from this scope may vary from computational process to construction, small-scale home robots to industrial robots.
Embedded systems. Embedded systems are generally known as micro-processors or microcontrollers that are designed to perform a specific instruction. Topics from this scope widely vary from microcontrollers, robots’ sensors and actuators, to power electronics. It also can be extended into power electronics control which generally focuses on applying control systems to power electronics to build more improved and advanced motion of robots.
Control systems. Topics from control systems are widely varied. Generally, a control system can be defined as anything that manages, instructs, informs, or commands any system or behavior to achieve preferred results. Subtopics may be included in non-linear or linear control systems, intelligent control systems, automation control systems, and formation control.
Specified subtopics can be categorized into Linear control, such as Proportional Integral Derivative (PID) Control.
Modern control such as State-Feedback Control, Integral State Feedback, State Observer, and Fractional Order PID (FOPID).
Optimal control such as Linear Quadratic Regulator (LQR).
Nonlinear control such as Feedback Linearization, Gain scheduling, Lyapunov, Backstepping, High Gain Observer, and Passivity.
Robust control such as Sliding Mode Control, Terminal Sliding Mode Control, and Dynamic Sliding Mode Control.
Intelligent control such as Machine Learning Control, Neural Networks Control, Fuzzy Control, Expert Systems, and Reinforcement Learning.
Adaptive control such as Model Predictive Control.
Controller optimization using Genetic Algorithm, Particle Swarm Optimization.
Path planning algorithms such as Potential Field.
Network Control Systems.
Author Guidelines
Carefully read the submission guidelines as follows:
A. General Requirements
The minimum standard requirements of the Journal of Robotics and Control must be:
- Written in English.
- The length of the submitted paper is at least 6 pages.
- Use a tool such as Zotero, Mendeley, or EndNote for reference management and formatting or manual citation, and choose IEEE style
- Make sure that your paper is prepared using the JRC paper template
B. Structure of The Manuscript
The manuscript must be prepared and suggested to present the following structure:
- Title. The paper's title should describe the research aims, method/model, and objective without Acronyms or abbreviations.
- Abstract. The Abstract has 150 to 250 WORDS; No citation; State in the abstract a Background (1-2 Sentences), Research Methodology (2-3 Sentences), Results (Minimal 8 Sentences), and the Conclusions (1-2 Sentences).
- Section structure. Authors are suggested to present their articles in the section structure: Introduction - Method - Results and Discussion – Conclusion.
- References. Expect at least 60 references, primarily with 100% to journal papers. The references must be up-to-date references (5 years back). See the guide to writing the references in IEEE Style Format https://youtu.be/ijmG7iZ0yz0.
See the guide for submission https://youtu.be/3TFkfNEdEYE.
Please get in touch with info at jrc@umy.ac.id or jrcofumy@gmail.com for more information.
Submission Preparation Checklist
As part of the submission process, authors are required to check off their submission's compliance with all of the following items, and submissions may be returned to authors that do not adhere to these guidelines.
- The submission has not been previously published, nor is it before another journal for consideration (or an explanation has been provided in Comments to the Editor).
- The submission file is using the article journal template. We will REJECT your paper if it does not follow the article journal template.
-
The submission file is in Microsoft Word document file format (2MB Limit File Size). If the size is more than 2MB, please upload the PDF File format and send the word to the journal email.
Also, please upload your paper file in the supplementary file for backup.
-
The minimum number of references is 60 JOURNAL REFERENCES published 5 years ago from IEEE Explore, Science Direct, or Scopus Databases. The reference must use the IEEE STYLE.
We will REJECT your paper if it does not have 60 references from JOURNAL Published 5 Years and IEEE-style references.
- The text adheres to the stylistic and bibliographic requirements outlined in the Author Guidelines, which is found in About the Journal.
- The maximal plagiarism is 25% with each main source no more than 4%. Please upload your Turnitin/Ithenticate check file in the supplementary file.
Publication Ethics and Malpractice Statement
Journal of Robotics and Control, called JRC, is committed to upholding the highest standards of publication ethics and takes all possible measures against any publication malpractices. The Editorial Board is responsible for, among others, preventing publication malpractice. Unethical behavior is unacceptable, and the JRC does not tolerate plagiarism in any form. Authors who submitted articles: affirm that manuscript contents are original. Furthermore, the authors’ submission also implies that the manuscript has not been published previously in any language, either wholly or partly, and is not currently submitted for publication elsewhere. Editors, authors, and reviewers, within the International Journal of Advances in Intelligent Informatics, are to be fully committed to good publication practice and accept the responsibility for fulfilling the following duties and responsibilities, as set by the COPE Code of Conduct for Journal Editors. As part of the Core Practices, COPE has written guidelines on the http://publicationethics.org/resources/guidelines.
Section A: Publication and authorship
- All submitted papers are subject to a strict peer-review process by at least two international reviewers that are experts in the area of the particular paper.
- The review process is a blind peer review.
- The factors that are taken into account in review are relevance, soundness, significance, originality, readability and language.
- The possible decisions include acceptance, acceptance with revisions, or rejection.
- If authors are encouraged to revise and resubmit a submission, there is no guarantee that the revised submission will be accepted.
- Rejected articles will not be re-reviewed.
- The paper acceptance is constrained by such legal requirements as shall then be in force regarding libel, copyright infringement and plagiarism.
- No research can be included in more than one publication.
Section B: Authors’ responsibilities
- Authors must certify that their manuscripts are their original work.
- Authors must certify that the manuscript has not previously been published elsewhere.
- Authors must certify that the manuscript is not currently being considered for publication elsewhere.
- Authors must participate in the peer-review process.
- Authors are obliged to provide retractions or corrections of mistakes.
- All Authors mentioned in the paper must have significantly contributed to the research.
- Authors must state that all data in the paper are real and authentic.
- Authors must notify the Editors of any conflicts of interest.
- Authors must identify all sources used in the creation of their manuscript.
- Authors must report any errors they discover in their published paper to the Editors.
Section C: Reviewers’ responsibilities
- Reviewers should keep all information regarding papers confidential and treat them as privileged information.
- Reviews should be conducted objectively, with no personal criticism of the author
- Reviewers should express their views clearly with supporting arguments
- Reviewers should identify relevant published work that has not been cited by the authors.
- Reviewers should also call to the Editor in Chief’s attention any substantial similarity or overlap between the manuscript under consideration and any other published paper of which they have personal knowledge.
- Reviewers should not review manuscripts in which they have conflicts of interest resulting from competitive, collaborative, or other relationships or connections with any of the authors, companies, or institutions connected to the papers.
Section D: Editors’ responsibilities
- Editors have complete responsibility and authority to reject/accept an article.
- Editors are responsible for the contents and overall quality of the publication.
- Editors should always consider the needs of the authors and the readers when attempting to improve the publication.
- Editors should guarantee the quality of the papers and the integrity of the academic record.
- Editors should publish errata pages or make corrections when needed.
- Editors should have a clear picture of research’s funding sources.
- Editors should base their decisions solely one the papers’ importance, originality, clarity and relevance to publication’s scope.
- Editors should not reverse their decisions nor overturn the ones of previous editors without serious reason.
- Editors should preserve the anonymity of reviewers.
- Editors should ensure that all research material they publish conforms to internationally accepted ethical guidelines.
- Editors should only accept a paper when reasonably certain.
- Editors should act if they suspect misconduct, whether a paper is published or unpublished, and make all reasonable attempts to persist in obtaining a resolution to the problem.
- Editors should not reject papers based on suspicions, they should have proof of misconduct.
- Editors should not allow any conflicts of interest between staff, authors, reviewers and board members.
Plagiarism Check
JRC Editorial Board will ensure that every published article will not exceed a 25% similarity Score. Plagiarism screening will be conducted by JRC Editorial Board using Plagiarism X Checker and Turnitin Similarity Check.
References Managament
The references and citations are using IEEE Style. The author can use reference management software e.g. Zotero, EndNote®, Mendeley, or Manual References.
Withdrawn of Manuscript
The author is not allowed to withdraw the submitted manuscript because the withdrawal is a waste of valuable resources that editors and referees spent a great deal of time processing the submitted manuscript and works invested by the Publisher. However, the authors could suggest the withdrawal if there is no updated progress review information after six months from our side.
Section Policies
Articles
Open Access Policy
This journal is an open-access journal that provides immediate, worldwide, barrier-free access to the full text of all published articles without charge readers or their institutions for access. Readers have the right to read, download, copy, distribute, print, search, or link to the full texts of all articles. This journal provides immediate open access to its content on the principle that making research freely available to the public supports a greater global exchange of knowledge.
This journal adheres to the best practice and high publishing standards and complies with the following conditions:
- Provides immediate open access to its content on the principle that making research freely available to the public supports a greater global exchange of knowledge;
- Allows the author to hold the copyright and to retain publishing rights without restrictions;
- Uses DOIs as permanent identifiers;
- Embeds machine-readable CC licensing information in articles;
- Allows generous reuse and mixing of content, in accordance with CC BY-SA license;
- Can Provide Provide article-level metadata for any indexers and aggregators.

This Journal is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Peer Review Process
This journal uses double-blind peer review, which means that the paper's reviewers won’t get to know the identity of the author(s), and the author(s) won’t get to know the reviewer's identity. The idea is that everyone should get a similar and unbiased review. The peer review process will take a time approximately 6 months.
Peer Review Process
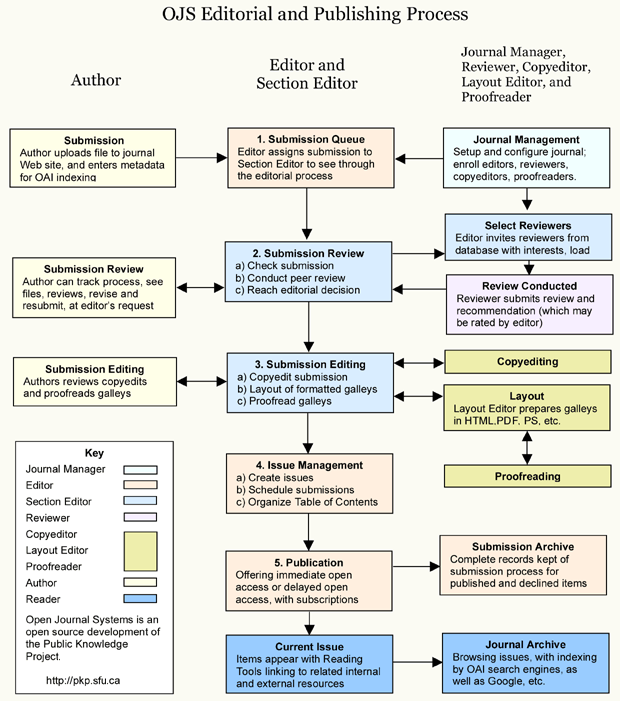
The process can be described as follow.
1. An editor first reviews the submitted manuscript. It will be evaluated whether it is suitable for the Journal of Robotics and Control focus and scope or has a major methodological flaw and similarity score by using Turnitin. The decision is rejected or accepted for a review process.
2. The manuscript will be sent to at least two anonymous reviewers (Double Blind Review). Reviewers' comments are then sent to the corresponding author for necessary actions and responses.
3. Afterward, the editorial team meeting suggested the authors' final decision on the revised manuscript.
4. Finally, the Editor will send the final decision to the corresponding author.
5. The accepted manuscript continued with copyediting and layout editing to prepare the camera-ready paper.
Review Outcomes
The Editor will make a final publication decision using feedback from the peer review process. Decisions categories include:
- Reject - Rejected manuscripts will not be published, and authors will not have the opportunity to resubmit a revised version to JRC.
- Major Revision - The manuscript will be reviewed again after some major modifications are made.
- Minor Revisions - Manuscripts receiving an accept-pending-revisions decision will be published in JRC if minor modifications are made. An editor will review revisions to ensure necessary updates are made before publication.
- Accept - Accepted manuscripts will be published in the current form without further modifications.
The detailed Journal peer review process is based on the following chart:
Publication Frequency
This journal is published six times a year.
Copyright Notice
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)
JRC is licensed under an International License
Privacy Statement
The names and email addresses entered in this journal site will be used exclusively for the stated purposes of this journal and will not be made available for any other purpose or to any other party.
