Real Time DC Motor Position Control Using PID Controller in LabVIEW
DOI:
https://doi.org/10.18196/jrc.25104Keywords:
DC motor, position control, PID controller, Arduino, LabVIEWAbstract
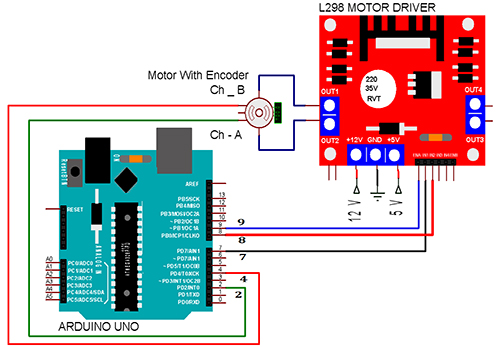
Direct current (DC) motors are the most used motors in control engineering applications due to their simplicity of construction, easy to control, and excellent performance. These motors should be well controlled to perform the required task. This research focuses on DC motor functional application in terms of a position control system using LabVIEW. This control system is a closed-loop real-time control system whereas incremental encoder 298 is coupled to the motor shaft to provide the feedback position signal to a controller; Proportional Integral Derivative (PID) The PID controls the position of the DC motor at the desired position with a minimum error. The PID controller was implemented in LabVIEW software which sends the control signal to the real-time DC motor through the Arduino board. In addition, LabVIEW software was developed to show the output response of motor position versus time to easily observe the performance of the system. The PID controller gains were obtained based on the trial and error method. The system under these controller parameters has been tested at different positions of tracking signal and for disturbance rejection. Finally, the results showed that the designed controller had good performance characteristics where the desired position of the motor was maintained.
References
Baćac N., Slukić V., Puškarić M., Štih B., Kamenar E., Zelenika S, “Comparison of different DC motor positioning control algorithms,” 37th International Convention on Information and Communication Technology, Electronics and Microelectronics, pp. 1654–1659, 2014.
E. Kamenar and S. Zelenika, “Micropositioning mechatronics system based on FPGA architecture,” 36th International Convention on Information and Communication Technology, Electronics and Microelectronics, pp. 138-143, 2013.
G. F. Franklin, J. D. Powel and A. Emami-Naeini, Feedback control of dynamic systems, 2nd ed, Addison-Wesley, 1991.
N. Kumar and P. Krishna, “Low cost data acquition and control using Arduino prototyping platform and LabVIEW,” IJSR, vol. 2, pp.366-369, February 2013.
A. I. Bin Man, Designed a real-time DC motor speed and position control for learning purpose using operational amplifier as an analog PID controller, Bsc. Project, UTMM, May 2008.
S. Raghavan, Digital Control for Speed and Position of A DC Motor, MS Thesis, Texas A&M University Kingsvill, 2005.
I. I. Incze, A. Negrea, M. Imecs and C. Szabo, “Incremental Encoder Based Position and Speed Identification: Modelling and Simulation,” Acta Universitatis Sapientiae Electrical and Mechanical Engineering, pp.27-39, 2010.
F. Arvani, S. N. Ferdaus and M. T. Iqbal, “Digital control of MS-150. Modular Position Servo System,” IEEE NECEC, November 2007.
J. Liu, P. Zhang and F.Wang “Real Time DC Servo Motor Position Control by PID Controller Using Labview,” International Conference on Intelligent Human-Machine Systems and Cybernetics, pp. 206-209, August 2009.
R. Ranjani, R. Preethii, S. J. Sumitha, “Controlling the speed of a DC motor using LabVIEW,” IJAREEIE, Vol. 4, pp. 9463-9469, December 2015.
N. H. Binti Yaziz, Digital speed and position control system incorporating an incremental encoder, M.Sc. project, UTHM, July 2014.
Incze, J. J., Szabó Cs., and Imecs M., “Modeling and simulation of an incremental encoder used in electrical drives,” 10th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics, Budapest, Hungary, pp. 97-109. 2009.
M. Ren, J. Zhang, H. Yue, and S. Zhou, “Adaptive neural network cascade control system with entropy-based design,” IET Control Theory Appl., vol. 10, no. 10, pp. 1151–1160, Jun. 2016.
C. Jauregui, M. Duarte Mermoud, G. Lefranc, R. Orostica, J. C. Travieso Torres, and O. Beytia, “Conical Tank Level Control with Fractional PID,” IEEE Lat. Am. Trans., vol. 14, no. 6, pp. 2598–2604, Jun. 2016.
A. S. Bazanella, L. F. A. Pereira, and A. Parraga, “A New Method for PID Tuning Including Plants Without Ultimate Frequency,” IEEE Trans. Control Syst. Technol., vol. 25, no. 2, pp. 637–644, Mar. 2017.
J. Fei, Y. Chu, and S. Hou, “A Backstepping Neural Global Sliding Mode Control Using Fuzzy Approximator for Three-Phase Active Power Filter,” IEEE Access, vol. 5, pp. 16021–16032, 2017.
J.-H. Yang and H.-K. Xu, “Robust Controller Design for Non-Minimum Phase UAV System and System Analysis,” IEEE Access, vol. 6, pp. 70734–70769, 2018.
A. Bisoffi, M. Da Lio, A. R. Teel, and L. Zaccarian, “Global Asymptotic Stability of a PID Control System With Coulomb Friction,” IEEE Trans. Automat. Contr., vol. 63, no. 8, pp. 2654–2661, Aug. 2018.
S. Han and S. P. Bhattacharyya, “PID Controller Synthesis Using a <inline-formula> <tex-math notation="LaTeX">$sigma$ </tex-math> </inline-formula>-Hurwitz Stability Criterion,” IEEE Control Syst. Lett., vol. 2, no. 3, pp. 525–530, Jul. 2018.
J. Wang, Z. Luo, Y. Wang, B. Yang, and F. Assadian, “Coordination Control of Differential Drive Assist Steering and Vehicle Stability Control for Four-Wheel-Independent-Drive EV,” IEEE Trans. Veh. Technol., vol. 67, no. 12, pp. 11453–11467, Dec. 2018.
T. MohammadRidha et al., “Model Free iPID Control for Glycemia Regulation of Type-1 Diabetes,” IEEE Trans. Biomed. Eng., vol. 65, no. 1, pp. 199–206, Jan. 2018.
V. Gholamrezaie, M. G. Dozein, H. Monsef, and B. Wu, “An Optimal Frequency Control Method Through a Dynamic Load Frequency Control (LFC) Model Incorporating Wind Farm,” IEEE Syst. J., vol. 12, no. 1, pp. 392–401, Mar. 2018.
J. Benavides, A. del Pozo, and E. Salinas, “Identification and control of a laboratory-scale prototype for crushing copper,” IEEE Lat. Am. Trans., vol. 14, no. 2, pp. 549–558, Feb. 2016.
W. M. A. Rosado, L. G. V. Valdes, A. B. Ortega, J. R. Ascencio, and C. D. G. Beltran, “Passive Rehabilitation Exercises with an Ankle Rehabilitation Prototype Based in a Robot Parallel Structure,” IEEE Lat. Am. Trans., vol. 15, no. 1, pp. 48–56, Jan. 2017.
N. Wang, X. Chen, Q. Lan, G. Song, H. R. Parsaei, and S.-C. Ho, “A Novel Wiki-Based Remote Laboratory Platform for Engineering Education,” IEEE Trans. Learn. Technol., vol. 10, no. 3, pp. 331–341, Jul. 2017.
M. Rogerio Caldieri, J. Andre Bigheti, and E. Paciencia Godoy, “Implementation and Evaluation of Wireless Networked Control Systems using Modbus,” IEEE Lat. Am. Trans., vol. 15, no. 2, pp. 206–212, Feb. 2017.
C. A. Calderon, C. Ramirez, V. Barros, and G. Punin, “Design and Deployment of Grasp Control System applied to robotic hand prosthesis,” IEEE Lat. Am. Trans., vol. 15, no. 2, pp. 181–188, Feb. 2017.
Mustafa Saad, Mohammad Khalallah, “Design and implementation of an embedded ball-beam controller using PID algorithm,” Universal Journal of Control and Automation, vol. 5 pp. 63-70, 2017.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
