Autotuning Fuzzy PID Controller for Speed Control of BLDC Motor
DOI:
https://doi.org/10.18196/jrc.25114Keywords:
BLDC Motor, Brushless DC Motor, Control, PID, Fuzzy, Auto-tuningAbstract
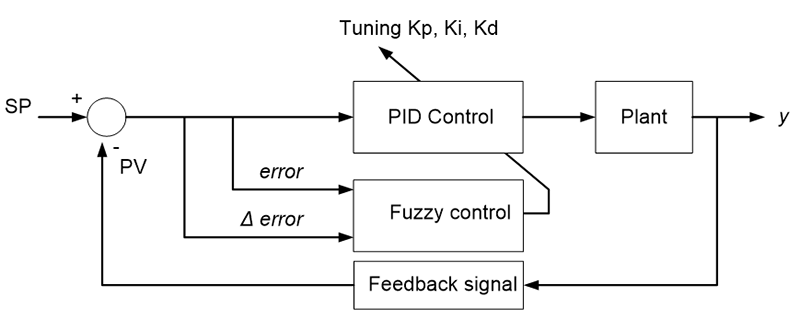
The PID control system is widely used for industrial machine control processes. The success of PID control is determined by tuning PID parameters. In PID control the tuning is carried out offline without taking into account changes that occur in the plant and the disturbances that arise. This study aims to optimize PID parameters online by taking into account the changes that occur in the plant and the disturbances that arise using fuzzy logic-based controls and tested on a BLDC motor which is a non-linear system. Set PID parameters with fuzzy logic using a combination of 49 if-then rules. To set proper PID parameters in real time, a two-level control system was built. The first level to define PID parameters by finding the minimum and maximum values of kp, ki and kd by the reaction method curve. The second level is designing the Fuzzy system to automatically set the PID parameters, then formulating a combination of 49 fuzzy if-then rules to get the value kp, ki, kd, error and change in delta error value. Testing of set point changes at BLDC Motor loads with no load and 0.5kg load and changes in speed get a response from the PID control system with an average value of 0.025 seconds rise time, 0.1625 seconds preset time, and 15.98% overshoot. While the Fuzzy PID control produces an average rise time value of 0.0025 seconds, preset time 0.057 seconds, overshoot of 5.42%.
References
Gunterus, Frans.,”Basic Philosophy: Process Control Systems“, Jakarta. PT. Elex Media Komputindo,1994
Wang, L. X.,”A Course in Fuzzy Systems and Control”, New Jersey: Prentice-Hall International. Inc: pp. 257- 263. 1997
M. Depenbrok, IEEE Trans, On Power Electronics 3 (1988) 420.
J.M Jacob,”Industrial Control Electronics Application and Design”, Prize Hall Inc. Englewood Cliffs, New Jersey, 1988.
Y. S. Lai, Proceedings of the IEEE PES Winter Meeting, 1999, p. 47
C.T Lin, C.S Lee,” Neural Fuzzy Systems”, Prentice Hall Inc, Englewood Cliffs, New Jersey, 1996
Kose E and Muhurcu A,”The control of brushless DC motor for electric vehicle by using chaotic synchronization method”, Study Inform Control 2018; 27: 403–412.
Ramya A, Imthiaz A and Balaji M,” Hybrid self tuned fuzzy PID controller for speed control of brushless DC motor”, Automatika 2016; 57: 672–679.
Liu K, Zhou ZQ and Hua W,”A novel region refinement pulse width modulation method for torque ripple reduction of brushless DC motor”, IEEE Access 2019; 7: 5333–5342.
Sun X, Cao J, Lei G, et al,”Speed sensorless control for permanent magnet synchronous motors based on finite position set”, IEEE Trans Ind Electron 2020; 67: 6089–6100.
Sun X, Wu M, Lei G, et al,”An improved model predictive current control for PMSM drives based on current track circle”, IEEE Trans Ind Electron 2020; 1–1. DOI: 10.1109/TIE.2020.2984433.
Cao Y, Shi T, Yan Y, et al,” Braking torque control strategy for brushless DC motor with a noninductive hybrid energy storage topology”, IEEE Trans Power Electron 2020; 35: 8417–8428.
Bo Tan, Xipo Wang, et al, “A lag angle Compesation Strategy of phase current for high speed BLDC motors”, IEEE Access 2019; 7:2169-3536
Amirthalingam R, Mahadevan B, and Vijayarajan K, “Adaptive MF tuned fuzzy logic speed controller for BLDC motor drive using ANN and PSO technique”, J.Eng., 2019, Vol 2019 iss 17, pp. 3947-3950
Adel A. El-samahy and Mohamed A. S, “Brushless DC motor tracking control using self tuning fuzzyPID controland model reference adaptive control”, Ain Shams Engineering Journal (2018) 9, 341-352
Adil Usman and Bharat Singh R, “Comphehensive analysis of demagnetization faults in BLDC motors using Novel hybrid electrical equivalent circuit and numerical based approach”, IEEE Access 2019; Vol 7, 2019 : 147542-147552
S. Kumaresan and H.Habeebullah Sait, “Design and control of shuntpower filter for power quality improvment of utility powered brushless DC motor drives”, AUTOMATIKA 2020, Vol. 61, No. 3, 507-521
B.N Kommula and V.R Kota, “Direct instantaneous torque control of brushless DC motor using firely algorithm based fractional order PID controller”, Journal of king Saud University-Engineering Sciences 32(2020), 133-140
Marek Pawel Ciurys, “Electromagnetic phenomena analisys in brushless DC motor with speed control using PWM method”, DE GRUYEN open, Open Phys, 2017; 15: 907-912
Nam Nuh and Hyung Seok Park, at el, “Hybrid pwm control for regulating the high speed operationof BLDC motors and expanding the current sensing range of DC link single shunt”, Energies 2019, 12, 4347
Peter Bober, “Measurement of objective function for BLDC motor optimization”, Acta Electrotechnica et Informatica, Vol. 17, No.4, 2017: 43-49
Rubaai A and Young P,”Hardware/software implementation of fuzzy-neural-network self-learning control methods for brushless DC motor drives”, IEEE Trans Ind Appl 2016; 52: 414–424.
Gao J and Hu Y, ”Direct self-control for BLDC motor drives based on three-dimensional coordinate system”, IEEE Trans Ind Electron 2010; 57: 2836–2844.
Joice CS, Paranjothi SR and Kumar VJS, “Digital control strategy for four quadrant operation of three phase BLDC motor with load variations”, IEEE Trans Industr Inform 2013; 9: 974–982.
Sun X, Jin Z, Cai Y, et al, “Grey Wolf optimization algorithm based state feedback control for a bearingless permanent magnet synchronous machine”, IEEE Trans Power Electron 2020; 35: 13631–13640.
Khoshdarregi MR, Tappe S and Altintas Y, “Integrated five-axis trajectory shaping and contour error compensation for high-speed CNC machine tools”, IEEE/ASME Trans Mechatron 2014; 19: 1859–1871.
Hu H, Wang T, Zhao S, et al, “Speed control of brushless direct current motor using a genetic algorithm–optimized fuzzy proportional integral differential controller”, Adv Mech Eng 2019; 11: 1–13.
Premkumar K and Manikandan BV, “Stability and performance analysis of ANFIS tuned PID based speed controller for brushless DC motor”, Curr Signal Transduct Ther 2018; 13: 19–30.
Cho CN, Song YH, Lee CH, et al, “Neural network based real time PID gain update algorithm for contour error reduction”, Int J Precis Eng Manuf 2018; 19: 1619–1625.
Kento K, Shin W and Shuichi O, “Design of neural network PID controller based on E-FRIT”, Electr Eng Jpn 2018; 205: 33–42.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
