Backstepping Control for a Tandem Rotor UAV Robot with Two 2-DOF Tiltable Coaxial Rotors
DOI:
https://doi.org/10.18196/jrc.25116Keywords:
tiltable coaxial rotor, UAV, control allocation, backstepping controlAbstract
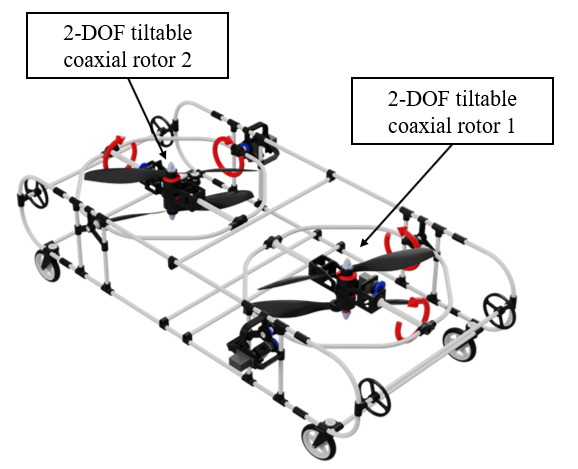
The study of a fully actuated multi-rotor UAV robot is very important in the field of infrastructure inspection because it needs a dexterous motion, such as hovering in a special fixed attitude, etc. This paper presents a backstepping control method for a simplified fully actuated model of a tandem-rotor UAV robot with two 2-DOF tiltable coaxial rotors. A MIMO vectorial backstepping approach is adopted here because the input distribution matrix is a square and nonsingular matrix. The two-stage control method based on the Lyapunov second method is presented to stabilize the position and attitude of the whole system. The static control allocation problem is also solved by using a Moore-Penrose pseudo-inverse. Finally, two simulations are demonstrated to verify the performance of the proposed control method, where one is a stabilizing problem in which all the desired position and attitude are to be constant, whereas the other is a trajectory tracking problem in which the desired positions are time-varying while the desired attitudes are to be constant.
References
H. Menouar, I. Guvenc, K. Akkaya, A. S. Uluagac, A. Kadri and A. Tuncer, “UAV-enabled intelligent transportation systems for the smart city: Applications and challenges,” IEEE Commun. Mag., vol. 55, no. 3, pp. 22–28, 2017.
M.R. Haque, M. Muhammad, D. Swarnaker, M. Arifuzzaman, “Autonomous quadcopter for product home delivery,” in Proc. of International Conference on Electrical Engineering and Information & Communication Technology (ICEEICT), 2014.
K.T. San, E.Y. Lee, Y.S. Chang, “The delivery assignment solution for swarms of UAVs dealing with multi-dimensional chromosome representation of genetic algorithm,” in Proc. of Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), IEEE Annual, 2016.
T. Tomic, K. Schmid, P. Lutz, A. Domel, M. Kassecher, E. Mair, I. L. Grixa, F. Ruess, M. Suppa, D. Burschka, “Toward a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue,” IEEE Robotics and Automation Magazine, vol. 19, no. 3, pp. 46–56, 2012.
J. Scherer, S. Yahyanejad, S. Hayat, E. Yanmaz, T. Andre, A. Khan, et al., “An autonomous multi-UAV system for search and rescue,” in Proc. of Intern. Conf. Mobile Systems Applications and Services, pp. 1–6, 2015.
A. Al-Kaff, F. M. Moreno, L. J. San José, F. García, D. Martín, A. De La Escalera, et al., “Vbii-uav: Vision-based infrastructure inspection-uav,” in Proc. of World Conference on Information Systems and Technologies WorldCist'17, pp. 221–231, 2017.
M. Nakao, M. Ito, Y. Kutuna, M. Yamada, M. Yamada and Y. Hada, “Development of a bridge inspection support robot system that uses a two-wheeled quad-rotor helicopter,” in Proc. of East Asia-Pacific Conference on Structural Engineering and Construction, pp. 293–301, 2016.
C. Zhang and J. M. Kovacs, “The application of small unmanned aerial systems for precision agriculture: A review,” Precis. Agricult., vol. 13, no. 6, pp. 693–712, 2012.
S. Khanal, J. Fulton and S. Shearer, “An overview of current and potential applications of thermal remote sensing in precision agriculture,” Comput. Electron. Agricult., vol. 139, pp. 22–32, 2017.
K. Whitehead, B. J. Moorman and C. H. Hugenholtz, “Low-cost on-demand aerial photogrammetry for glaciological measurement,” Cryosphere Discuss., vol. 7, no. 3, pp. 1879-1884, 2013.
Turner, D., Lucieer, A. and Wallace, L. (2013), “Direct georeferencing of ultrahigh-resolution UAV imagery,” IEEE Transactions on Geoscience and Remote Sensing, available online doi: 10.1109/TGRS.2013.2265295. https://doi.org/10.1109/TGRS.2013.2265295
C.H. Hugenholtz, K. Whitehead, O.W. Brown, T.E. Barchyn, B.J. Moorman, A. LeClair, K. Riddell, T. Hamilton, “Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model,” Geomorphology, vol. 194, pp. 16-24, 2013.
H.C.T.E. Fernando, A. Silva, M. Zoysa and R. Munasinghe, “Modelling simulation and implementation of a quadrotor UAV,” in Proc. of IEEE International Conference on Industrial and Information Systems, pp. 207–212, 2013.
R. Rashad, J. Goerres, R. G. Aarts, J. B. Engelen, and S. Stramigioli, “Fully actuated multirotor UAVs: A literature review,” IEEE Robot. Automat. Mag., doi: 10.1109/MRA.2019.2955964.
M. Hamandi, F. Usai, Q. Sable, N. Staub, M. Tognon, and A. Franchi, “Survey on aerial multirotor design: a taxonomy based on input allocation,” Jan. 2020, working paper or preprint. [Online]. Available: https://hal.archives-ouvertes.fr/hal-02433405
K. Bodie, Z. Taylor, M. Kamel and R. Siegwart, “Towards efficient full pose omnidirectionality with overactuated MAVS,” 2018, [online] Available: https://arxiv.org/abs/1810.06258.
S. Rajappa, M. Ryll, H. H. Bülthoff and A. Franchi, “Modeling control and design optimization for a fully-actuated hexarotor aerial vehicle with tilted propellers,” in Proc. of 2015 IEEE Int. Conf. Robotics and Automation (ICRA), pp. 4006–4013, 2015.
Y. Tadokoro, T. Ibuki, and M. Sampei, “Classification and structural evaluation of fully-actuated hexrotor UAVs,” in Proc. Annu. Amer. Control Conf. (ACC), pp. 1945–1950, 2018.
G. Jiang, R. Voyles, K. Sebesta, and H. Greiner, “Estimation and optimization of fully-actuated multirotor platform with nonparallel actuation mechanism,” in Proc. 2017 IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), pp. 6843–6848. doi: 10.1109/IROS.2017.8206605.
A. Franchi, R. Carli, D. Bicego and M. Ryll, “Full-pose tracking control for aerial robotic systems with laterally bounded input force,” IEEE Trans. Robot., vol. 34, no. 2, pp. 534–541, 2018.
M. Allenspach, K. Bodie, M. Brunner, L. Rinsoz, Z. Taylor, M.Kamel, R. Siegwart and J. Nieto, “Design and optimal control of a tiltrotor micro aerial vehicle for efficient omnidirectional flight,” arXiv preprint arXiv:2003.09512.
P. Segui-Gasco, Y. Al-Rihani, H.S. Shin, and A. Savvaris, “A novel actuation concept for a multi rotor UAV,” Journal of Intelligent & Robotic Systems, vol. 74, no. 1-2, pp.173–191, 2014.
X. Xu, K. Watanabe, and I. Nagai, “Development of an UAV robot that has multifunctional locomotion modes with tilted coaxial rotors,” in Proc. of 2018 37th Chinese Control Conference (CCC). Wuhan, pp. 7896–7900, 2018.
A. Bin Junaid, A. Diaz De Cerio Sanchez, J. Betancor Bosch, N. Vitzilaios, and Y. Zweiri, “Design and implementation of a dual-axis tilting quadcopter,” Robotics, vol. 7, no. 4, pp. 65, 2018.
M.J. Gerber, T. Tsao, “Twisting and tilting rotors for high-efficiency, thrust-vectored quadrotors,” Journal of Mechanisms and Robotics, vol. 10, no. 6, pp. 061013, 2018.
N. Amiri, A. Ramirez-Serrano, and R.J. Davies, “Integral backstepping control of an unconventional dual-fan unmanned aerial vehicle,” J Intell Robot Syst, vol. 69, pp. 147–159, 2013.
R. Mokhtari, C. Braham, B. Cherki, “Extended state observer based control for coaxial-rotor UAV,” ISA Transactions, vol 61, pp. 1–14, 2014.
J. Buzzatto, M. Liarokapis, “An agile, coaxial, omnidirectional rotor module: on the development of hybrid, all terrain robotic rotorcrafts,” in Proc. of IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Abu Dhabi, 2020, unpublished.
X. Xu, K. Watanabe and I. Nagai, “Feedback linearization control for a tandem rotor UAV robot equipped with two 2-DOF tiltable coaxial-rotors,” Artif Life Robotics (2020). https://doi.org/10.1007/s10015-020-00655-x.
M. Kamel, S. Verling, O. Elkhatib, C. Sprecher, P. Wulkop, Z. Taylor, R. Siegwart, and I. Gilitschenski, “The voliro omniorientational hexacopter: An agile and maneuverable tiltable-rotor aerial vehicle,” IEEE Robotics & Automation Magazine, vol. 25, no. 4, pp. 34–44, 2018.
B. Li, D. Wang and L. Ma, “BioTetra: a bioinspired multi-rotor aerial vehicle,” in Proc. of IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), Dali, China, pp. 114–119, 2019.
L. Zhou, J. Zhang, H. She and H. Jin, “Quadrotor UAV flight control via a novel saturation integral backstepping controller,” Automatika, vol. 60, no. 2, pp. 193–206, 2019.
T. I. Fossen and J. P. Strand, “A tutorial on nonlinear backstepping: Applications to ship control,” Model. Identification Contr., vol. 20, no. 2, pp. 83–135, 1999, [online] Available: http://www.mic-journal.no/micarchives.asp.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
