Small-scale Robot Arm Design with Pick and Place Mission Based on Inverse Kinematics
DOI:
https://doi.org/10.18196/jrc.26124Keywords:
robot arm, small-scale, pick and place, inverse kinematicsAbstract
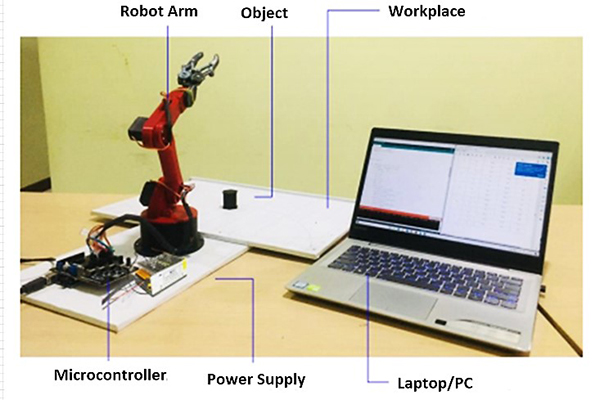
Robot arm is often used in industry with various tasks, one of which is a pick and place. Rapid prototyping of robot arms is needed to facilitate the development of many industrial tasks, especially on a laboratory scale. This study aims to design a small-scale three degree of freedom (3-DoF) robot arm for pick and place mission using the inverse kinematics method. The mechanical robotic arm system is designed using Solidworks with four servo motors as the actuator. Arduino Mega 2560 is used as a microcontroller in which the inverse kinematic method is embedded. This method is used to move the robot based on the coordinates of the destination pick and place. The test results show that the robot arm can carry out the pick and place mission according to the target coordinates given with the largest average error of about 5 cm. While the error generated between the calculation and computation results is around 3%.References
R. Gautam, A. Gedam, A. Zade, and A. Mahawadiwar, “Review on development of industrial robotic arm,” International Research Journal of Engineering and Technology (IRJET), vol. 4, no. 03, 2017.
Y. Becerra, M. Arbulu, S. Soto, and F. Martinez, “A comparison among the Denavit-Hartenberg, the screw theory, and the iterative methods to solve inverse kinematics for assistant robot arm,” In International Conference on Swarm Intelligence, Springer, Cham, 2019, pp. 447-457.
A. Patil, M. Kulkarni, and A. Aswale, “Analysis of the inverse kinematics for 5 DOF robot arm using DH parameters,” In 2017 IEEE International Conference on Real-time Computing and Robotics (RCAR), 2017, pp. 688-693.
C. Lopez-Franco, J. Hernandez-Barragan, A. Y. Alanis, and N. Arana-Daniel, “A soft computing approach for inverse kinematics of robot manipulators,” Engineering Applications of Artificial Intelligence, vol. 74, pp. 104-120, 2018.
G. B. Mahanta, B. B. V. L. Deepak, M. Dileep, B. B. Biswal, and S. K. Pattanayak, “Prediction of inverse kinematics for a 6-DOF industrial robot arm using soft computing techniques,” In Soft computing for problem solving, Singapore, 2019, pp. 519-530.
K. M. Myint, Z. M. M. Htun, and H. M. Tun, “Position control method for pick and place robot arm for object sorting system,” International journal of scientific & technology research, vol. 5, no. 06, pp. 57-61, 2016.
S. D. Han, S. W. Feng, and J. Yu, “Toward Fast and Optimal Robotic Pick-and-Place on a Moving Conveyor,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 446-453, 2019.
H. S. Nu'man, Y. Sofyan, and A. R. Al Tahtawi, “Pengendalian Robot Lengan Pemilah Benda Berdasarkan Bentuk Menggunakan Teknologi Computer Vision. In SEMNASTERA (Seminar Nasional Teknologi dan Riset Terapan), vol. 2, 2020, pp. 42-48.
N. F. Zulfardi, D. I. Saputra, A. D. A. Ahkam, “Aplikasi Deteksi Benda Menggunakan Metode Image Substraction Sebagai Masukan Koordinat Pada Robot Lengan 3 DOF,” In Prosiding Seminar Nasional Teknologi dan Riset Terapan (SEMNASTERA), vol. 1, 2019, pp. 30-37.
I. Ishak, J. Fisher, and P. Larochelle, “Robot arm platform for rapid prototyping: Concept,” In Proceedings in Florida Conference on Recent Advances in Robotics, 2015.
S. C. Gutiérrez, R. Zotovic, M. D. Navarro, and M. D. Meseguer, “Design and manufacturing of a prototype of a lightweight robot arm,” Procedia Manufacturing, vol. 13, pp. 283-290, 2017.
H. S. Kim and J. B. Song, “Low-cost robot arm with 3-DOF counterbalance mechanism,” In 2013 IEEE International Conference on Robotics and Automation, 2013, pp. 4183-4188.
G. Kato, D. Onchi and M. Abarca, “Low cost flexible robot manipulator for pick and place tasks,” 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, 2013, pp. 677-680.
N. Andrews, S. Jacob, S. M. Thomas, S. Sukumar and R. K. Cherian, “Low-Cost Robotic Arm for differently abled using Voice Recognition,” 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 2019, pp. 735-739.
Y. Wu, M. Wang and N. M. Mayer, “A new type of eye-on-hand robotic arm system based on a low-cost recognition system,” 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, 2017, pp. 110-114.
F. Šuligoj, B. Jerbić, M. Švaco, B. Šekoranja, D. Mihalinec and J. Vidaković, “Medical applicability of a low-cost industrial robot arm guided with an optical tracking system,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, 2015, pp. 3785-3790.
O. Kroeger, F. Wollschläger and J. Krüger, “Low-Cost Embedded Vision for Industrial Robots: A Modular End-of-Arm Concept,” 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 2020, pp. 1301-1304.
T. H. Luu and T. H. Tran, “3D vision for mobile robot manipulator on detecting and tracking target,” 2015 15th International Conference on Control, Automation and Systems (ICCAS), Busan, 2015, pp. 1560-1565.
P. P. Sarker, F. Abedin and F. N. Shimim, “R3Arm: Gesture controlled robotic arm for remote rescue operation,” 2017 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Dhaka, 2017, pp. 428-431.
R. Mardiyanto, M. F. R. Utomo, D. Purwanto and H. Suryoatmojo, “Development of hand gesture recognition sensor based on accelerometer and gyroscope for controlling arm of underwater remotely operated robot,” 2017 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, 2017, pp. 329-333.
L. Aggarwal, V. Gaur and P. Verma, “Design and implementation of a wireless gesture controlled robotic arm with vision,” International Journal of Computer Applications, vol. 79, no. 13, pp. 39-43, 2013.
S. A. Khajone, S. W. Mohod and V. M. Harne, “Implementation of a wireless gesture controlled robotic arm,” International Journal of innovative research in computer and communication engineering, vol. 3, no. 1, pp. 375-379, 2015.
W. M. H. W. Kadir, R. E. Samin, and B. S. K. Ibrahim, “Internet controlled robotic arm,” Procedia Engineering, vol. 41, pp. 1065-1071, 2012.
R. A. Atmoko and D. Yang, “Online Monitoring & Controlling Industrial Arm Robot Using MQTT Protocol,” 2018 IEEE International Conference on Robotics, Biomimetics, and Intelligent Computational Systems (Robionetics), Bandung, Indonesia, 2018, pp. 12-16.
P. Siagian and K. Shinoda, “Web based monitoring and control of robotic arm using Raspberry Pi,” 2015 International Conference on Science in Information Technology (ICSITech), Yogyakarta, 2015, pp. 192-196.
G. Zhang, Y. He, B. Dai, F. Gu, J. Han and G. Liu, “Robust Control of an Aerial Manipulator Based on a Variable Inertia Parameters Model,” IEEE Transactions on Industrial Electronics, vol. 67, no. 11, pp. 9515-9525, 2020.
K. Kunal, A. Z. Arfianto, J. E. Poetro, F. Waseel, and R. A. Atmoko, “Accelerometer Implementation as Feedback on 5 Degree of Freedom Arm Robot,” Journal of Robotics and Control (JRC), vol. 1, no. 1, pp. 31-34, 2020.
A. Abdulkareem, O. Ladenegan, A. F. Agbetuyi, and C. O. A. Awosope, “Design and Implementation of a Prototype Remote-Controlled Pick and Place Robot,” International Journal of Mechanical Engineering and Technology, vol. 10, no. 2, 2019.
K. Ghadge, S. More, P. Gaikwad, and S. Chillal, “Robotic arm for pick and place application,” International Journal of Mechanical Engineering and Technology, vol. 9, no. 1, pp. 125-133, 2018.
V. S. Manjula and R. I. Karamagi, “Automatic pick and place robot manipulation using a microcontroller,” J Appl Computat Math, vol. 7, no. 2, pp. 408, 2018.
M. Agni and A. R. Al Tahtawi, “Perancangan Robot Lengan Lima Derajat Kebebasan untuk Misi Pick and Place Berbasis Inverse Kinematics, In SEMNASTERA (Seminar Nasional Teknologi dan Riset Terapan), vol. 2, 2020, pp. 87-92.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
