A New Robotic Application for COVID-19 Specimen Collection Process
DOI:
https://doi.org/10.18196/jrc.v3i1.11659Keywords:
Covid-19, Cobot, Robot, Safety, KinematicAbstract
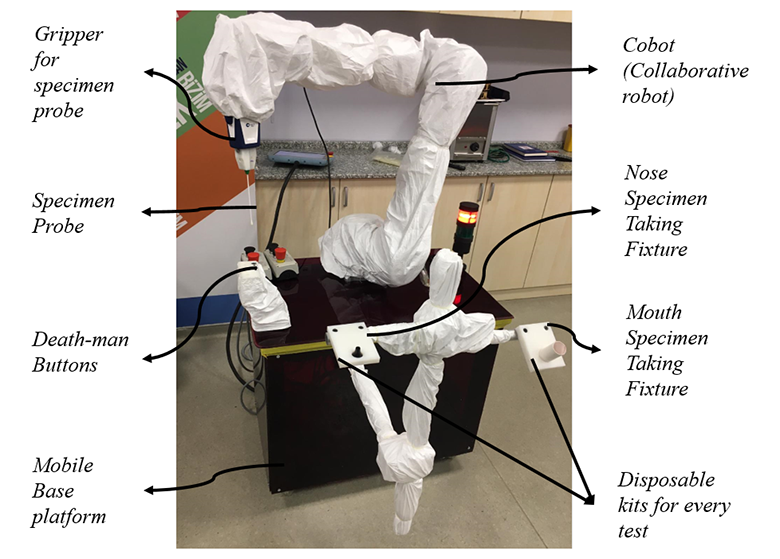
Covid-19 manual specimen collection process is too critical for health care workers due to they are able to getting infection from Covid-19-patient during the medical interaction. The purpose of this study, a novel robotic application is developed to achieve automatic specimen collection process for new corona virus (COVID-19). This application is a protection tool for health care workers for the Covid-19 pandemic. This robotic application easily and safely complete the sampling process task and assist to health care workers to prevent infection. The application is basically consist of a collaborative robot (COBOT), base plate, fixtures and a gripper. There are co-operation activities between the COBOT and health care worker to complete all tasks. The robotic application has been tested in the plant health care center as a prototype. The cycle-time (192 sec) for the robotic process needs to be improved. The Manual process is still %60 faster than robotic application. The biggest challenge in this application is patient’s mouth and nose physical size changes. Robot movements for the specimen collection in nose and mouth are arranged just based on the fixed point. This needs to be improved according to size changes. Covid-19 specimen collection process with a robotic application has been presented which don’t need any health care worker interaction with patient. This application needs to be improved related with above challenges to make a shelf product. It will create valuable impact and save lives in this pandemic.
References
G. Lazzari, E. Chiara Resta, M. Magli, E. D’Ettorre, and G. Silvano, “Are there overlapping clinical features between thoracic radiotherapy side effects and covid-19 pneumonia? Radiation pneumonitis outside the radiation ports: Three case reports,” Clin. Transl. Radiat. Oncol., vol. 25, pp. 107–111, Nov. 2020.
M. Al-Otaibi et al., “Catheter-Directed Thrombolysis of Iliocaval Thrombosis in Patients With COVID-19 Infection,” JACC Case Reports, vol. 2, no. 12, pp. 2016–2020, Oct. 2020.
K. Malbul, S. Katwal, S. Maharjan, S. Shrestha, R. Dhital, and A. P. Rajbhandari, “Appendicitis as a presentation of COVID-19: A case report,” Ann. Med. Surg., vol. 69, no. June, p. 102719, Sep. 2021.
A. Hampshire et al., “Cognitive deficits in people who have recovered from COVID-19,” EClinicalMedicine, vol. 000, p. 101044, Jul. 2021.
V. R. Ribas et al., “Hemodynamics, baroreflex index and blood biomarkers of a patient who died after being affected by COVID-19: case report,” Hematol. Transfus. Cell Ther., vol. 42, no. 3, pp. 206–211, Jul. 2020.
E. Jamrozik et al., “Key criteria for the ethical acceptability of COVID-19 human challenge studies: Report of a WHO Working Group,” Vaccine, vol. 39, no. 4, pp. 633–640, Jan. 2021.
M. Nambiar, S. R. Varma, and M. Damdoum, “Post-Covid alliance-mucormycosis, a fatal sequel to the pandemic in India,” Saudi J. Biol. Sci., no. xxxx, Jul. 2021.
E. Yuriditsky et al., “Clinical characteristics and outcomes of in-hospital cardiac arrest among patients with and without COVID-19,” Resusc. Plus, vol. 4, no. November 2020, p. 100054, Dec. 2020.
J. M. Casas-Rojo et al., “Clinical characteristics of patients hospitalized with COVID-19 in Spain: results from the SEMI-COVID-19 Registry,” Rev. Clínica Española (English Ed., vol. 220, no. 8, pp. 480–494, Nov. 2020.
N. R. Medjeral-Thomas et al., “Cohort Study of Outpatient Hemodialysis Management Strategies for COVID-19 in North-West London,” Kidney Int. Reports, vol. 5, no. 11, pp. 2055–2065, Nov. 2020.
A. Balkhair et al., “Anakinra in hospitalized patients with severe COVID-19 pneumonia requiring oxygen therapy: Results of a prospective, open-label, interventional study,” Int. J. Infect. Dis., vol. 103, pp. 288–296, 2021.
F. Maione et al., “Interleukin-17A (IL-17A): A silent amplifier of COVID-19,” Biomed. Pharmacother., vol. 142, p. 111980, 2021.
T. Nopsopon, J. Kittrakulrat, K. Takkavatakarn, T. Eiamsitrakoon, T. Kanchanabuch, and K. PONGPIRUL, “Pos-540 Covid-19 in Esrd Patients With Renal Replacement Therapies: a Systematic Review and Meta-Analysis,” Kidney Int. Reports, vol. 6, no. 4, pp. S235–S236, 2021.
J. Ferreira, “Myocardial infarction in the COVID-19 pandemic – Reperfusion therapy revisited,” Rev. Port. Cardiol., vol. 40, no. 7, pp. 473–474, 2021.
H. Alkofide, A. Almohaizeie, S. Almuhaini, B. Alotaibi, and K. M. Alkharfy, “Tocilizumab and Systemic Corticosteroids in the Management of Patients with COVID-19: A Systematic Review and Meta-Analysis,” Int. J. Infect. Dis., vol. 110, pp. 320–329, 2021.
I. Farella, R. Panza, M. Capozza, and N. Laforgia, “Lecithinized superoxide dismutase in the past and in the present: Any role in the actual pandemia of COVID-19?,” Biomed. Pharmacother., vol. 141, p. 111922, 2021.
N. M. Putri, P. Kreshanti, I. Aulia, A. N. Syarif, N. Tunjung, and C. L. Sukasah, “Use of local perforator flaps for closure of a thoraco-omphalopagus conjoined twin defect after separation during the COVID-19 pandemic,” Heliyon, vol. 7, no. 7, 2021.
M. Mølhave, A. J, and W. C, “Clinical Management of COVID-19 Patients – An Update,” Semin. Nucl. Med., 2021.
K. Duan et al., “Alterations of frontal-temporal gray matter volume associate with clinical measures of older adults with COVID-19,” Neurobiol. Stress, vol. 14, p. 100326, 5494.
G. De Luca et al., “Impact of renin-angiotensin system inhibitors on mortality during the COVID Pandemic among STEMI patients undergoing mechanical reperfusion: Insight from an international STEMI registry,” Biomed. Pharmacother., vol. 138, no. March, 5494.
M. Altinay et al., “Effect of early awake prone positioning application on prognosis in patients with acute respiratory failure due to COVID-19 pneumonia: a retrospective observational study,” Brazilian J. Anesthesiol. (English Ed., no. xx, 5494.
A. Bouchlarhem et al., “Brainstem stroke: a fatal thromboembolic event after new onset atrial fibrillation during covid-19 infection: A case report and literature review,” Radiol. Case Reports, 5494.
T. Chuthai, M. O. T. Cole, T. Wongratanaphisan, and P. Puangmali, “Adaptive Kinematic Mapping Based on Chebyshev Interpolation: Application to Flexure-Jointed Micromanipulator Control,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 1, pp. 118–129, Feb. 2020.
M. Vigne, A. El Khoury, F. Di Meglio, and N. Petit, “State Estimation for a Legged Robot With Multiple Flexibilities Using IMUs: A Kinematic Approach,” IEEE Robot. Autom. Lett., vol. 5, no. 1, pp. 195–202, Jan. 2020.
J. Kim, W. Lee, S. Kang, K.-J. Cho, and C. Kim, “A Needlescopic Wrist Mechanism With Articulated Motion and Kinematic Tractability for Micro Laparoscopic Surgery,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 1, pp. 229–238, Feb. 2020.
D. Chen, S. Li, W. Li, and Q. Wu, “A Multi-Level Simultaneous Minimization Scheme Applied to Jerk-Bounded Redundant Robot Manipulators,” IEEE Trans. Autom. Sci. Eng., vol. 17, no. 1, pp. 463–474, Jan. 2020.
H. Zhang, H. Jin, Z. Liu, Y. Liu, Y. Zhu, and J. Zhao, “Real-Time Kinematic Control for Redundant Manipulators in a Time-Varying Environment: Multiple-Dynamic Obstacle Avoidance and Fast Tracking of a Moving Object,” IEEE Trans. Ind. Informatics, vol. 16, no. 1, pp. 28–41, Jan. 2020.
N. Ma, X. Dong, and D. Axinte, “Modeling and Experimental Validation of a Compliant Underactuated Parallel Kinematic Manipulator,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 3, pp. 1409–1421, Jun. 2020.
J. Niu et al., “Kinematic Analysis of a Serial-Parallel Hybrid Mechanism and its Application to a Wheel-Legged Robot,” IEEE Access, vol. 8, pp. 111931–111944, 2020.
W. Li, L. Ding, H. Gao, and M. Tavakoli, “Haptic Tele-Driving of Wheeled Mobile Robots Under Nonideal Wheel Rolling, Kinematic Control and Communication Time Delay,” IEEE Trans. Syst. Man, Cybern. Syst., vol. 50, no. 1, pp. 336–347, Jan. 2020.
P. C. Santos, R. C. S. Freire, E. A. N. Carvalho, L. Molina, and E. O. Freire, “M-FABRIK: A New Inverse Kinematics Approach to Mobile Manipulator Robots Based on FABRIK,” IEEE Access, vol. 8, pp. 208836–208849, 2020.
R. Parween, M. Vega Heredia, M. M. Rayguru, R. Enjikalayil Abdulkader, and M. R. Elara, “Autonomous Self-Reconfigurable Floor Cleaning Robot,” IEEE Access, vol. 8, pp. 114433–114442, 2020.
X. Tian and Y. Xu, “Low delay control algorithm of robot arm for minimally invasive medical surgery,” IEEE Access, vol. 8, pp. 93548–93560, 5393.
Y.-D. Hong and B. Lee, “Real-Time Feasible Footstep Planning for Bipedal Robots in Three-Dimensional Environments Using Particle Swarm Optimization,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 1, pp. 429–437, Feb. 2020.
M. Nakajima, M. Tanaka, and K. Tanaka, “Simultaneous Control of Two Points for Snake Robot and Its Application to Transportation,” IEEE Robot. Autom. Lett., vol. 5, no. 1, pp. 111–118, Jan. 2020.
E. Fabregas et al., “Simulation and Experimental Results of a New Control Strategy For Point Stabilization of Nonholonomic Mobile Robots,” IEEE Trans. Ind. Electron., vol. 67, no. 8, pp. 6679–6687, Aug. 2020.
J. Wu, D. Zhang, J. Liu, and X. Han, “A Moment Approach to Positioning Accuracy Reliability Analysis for Industrial Robots,” IEEE Trans. Reliab., vol. 69, no. 2, pp. 699–714, Jun. 2020.
M. Khaledyan, T. Liu, V. Fernandez-Kim, and M. de Queiroz, “Flocking and Target Interception Control for Formations of Nonholonomic Kinematic Agents,” IEEE Trans. Control Syst. Technol., vol. 28, no. 4, pp. 1603–1610, Jul. 2020.
Z. Li, Y. Yuan, F. Ke, W. He, and C.-Y. Su, “Robust Vision-Based Tube Model Predictive Control of Multiple Mobile Robots for Leader–Follower Formation,” IEEE Trans. Ind. Electron., vol. 67, no. 4, pp. 3096–3106, Apr. 2020.
J. Sun, X. Han, Y. Zuo, S. Tian, J. Song, and S. Li, “Trajectory Planning in Joint Space for a Pointing Mechanism Based on a Novel Hybrid Interpolation Algorithm and NSGA-II Algorithm,” IEEE Access, vol. 8, pp. 228628–228638, 2020.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
