Attitude Control of a Quadrotor with Fuzzy Logic Controller on SO(3)
DOI:
https://doi.org/10.18196/jrc.v3i1.12956Keywords:
Quadrotor, Fuzzy Logic, SO(3), Attitude, Rotation MatrixAbstract
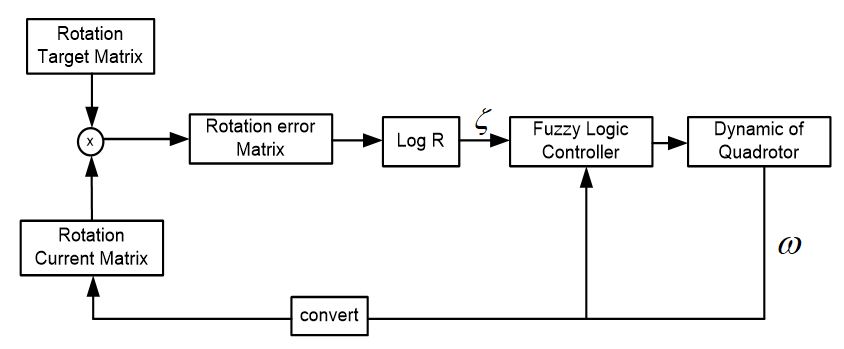
A quadrotor is an unmanned aerial vehicle (UAV) with two pairs of rotors rotating in opposite directions. Some of its unique abilities are hovering and vertical take-off and landing (VTOL). Most recent works carried out the UAVs' rotation parametrization using Euler angles and a quaternion. Those UAVs suffer from singularities and ambiguities. A geometric control is generally used to deal with those problems. Exponential coordinate in the geometric control maps R3 into SO(3). This paper presented a fuzzy logic controller on SO(3) to control the attitude of the quadrotor. The input of the fuzzy logic controller is the angular velocity (ω) and exponential coordinate error of rotation (ζ), while the output is torque (τ). The error function in this controller is a rotation matrix on SO(3). This proposed controller can control the attitude of the quadrotor based on the expected attitude for maneuvers both on one axis and all axis with a steady-state error of about 0.02 rad.
References
D. M. Harfina, Z. Zaini, and W. J. Wulung, "Disinfectant Spraying System with Quadcopter Type Unmanned Aerial Vehicle Technology as an Effort to Break the Chain of the COVID-19 Virus," Journal of Robotics and Control, vol. 2, no. 6, pp. 502-507, 2021.
O. Mofid, and S. Mobayen, "Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties," ISA Trans., vol. 72, pp. 1-14, Jan. 2018.
N. Chaturvedi, A. Sanyal, and N McClamroch, "Rigid-Body Attitude Control," IEEE Control Systems Magazines, vol. 31, pp. 30-51, 2011
A. Tayebi and S. Mcgilvray, “Attitude Stabilization of a VTOL Quadrotor Aircraft,” IEEE Transactions on Control Systems Technology, vol. 14, no. 3, pp. 562–571, 2006.
Z. He and L. Zhao, “A Simple Attitude Control of Quadrotor Helicopter Based on Ziegler-Nichols Rules for Tuning PD Parameters,” The Scientific World Journal, vol. 2014, pp. 1–13, 2014.
M. A. Abdelkhalek, M. S. El-demerdash, and A. A. El-tahan, “Attitude Stability of Quadcopter Using Classic Control with Angular Acceleration,” - International Journal of Computer Science and Information Technology & Security (IJCSITS), vol. 5, no. August, pp. 325–331, 2015.
K. U. Lee, H. S. Kim, J. B. Park, and Y. H. Choi, "Hovering control of a quadrotor," 2012 12th International Conference on Control, Automation and Systems, 2012, pp. 162-167.
R. Zhang, Q. Quan and K. -Y. Cai, “Attitude control of a quadrotor aircraft subject to a class of time-varying disturbances,” IET Control Theory & Applications, vol. 5, no. 9, pp. 1140–1146, 2011.
I. Ahmad, M. Liaquat, F. M. Malik, H. Ullah, and U. Ali, "Variants of the Sliding Mode Control in Presence of External Disturbance for Quadrotor," in IEEE Access, vol. 8, pp. 227810-227824, 2020.
Y. Chen et al., "Robust Control for Unmanned Aerial Manipulator Under Disturbances," in IEEE Access, vol. 8, pp. 129869-129877, 2020.
P. Ponce, A. Molina, I. Cayetano, J. Gallardo, and H. Salcedo, “Experimental Fuzzy Logic Controller Type 2 for a Quadrotor Optimized by Anfis,” IFAC-PapersOnLine, vol. 48, no. 3, pp. 2435–2441, 2014.
A. Eltayeb, M. F. Rahmat, M. A. Mohammed Eltoum, and M. A. Mohd Basri, "Adaptive Fuzzy Gain Scheduling Sliding Mode Control for quadrotor UAV systems," 2019 8th International Conference on Modeling Simulation and Applied Optimization (ICMSAO), 2019, pp. 1-5.
V. P. Tran, F. Santoso, M. A. Garratt, and I. R. Petersen, "Adaptive Second-Order Strictly Negative Imaginary Controllers Based on the Interval Type-2 Fuzzy Self-Tuning Systems for a Hovering Quadrotor with Uncertainties," in IEEE/ASME Transactions on Mechatronics, vol. 25, no. 1, pp. 11-20, Feb. 2020
M. A. M. Basri, A. R. Husain, and K. A. Danapalasingam, “Fuzzy supervisory backstepping controller for stabilization of quadrotor unmanned aerial vehicle,” International Conference on Intelligent and Advanced Systems (ICIAS), 2014, pp. 1-5.
Barghandan and M. A. Badamchizadeh, “A new approach for designing robust adaptive fuzzy sliding mode controller,” Iranian Conference on Electrical Engineering (ICEE), 2013, pp. 1- 6.
L. A. Zadeh, “Fuzzy sets,'' Inf. Control, vol. 8, pp. 338-353, Oct. 1965.
K. M. Passino and S. Yurkovich, Fuzzy control. 2010.
E. Fresk and G. Nikolakopoulos, “Full Quaternion Based Attitude Control for a Quadrotor,” European Control Conference (ECC) July 17-19, 2013, Zürich, Switzerland, pp. 3864–3869, 2013
S. Bhat, D. Bernstein, “A topological obstruction to continuous global stabilization of rotational motion and the unwinding phenomenon,” Systems and Control Letters, vol. 39, no. 1, pp. 66–73, 2000.
A. Akhtar, S. Saleem and S. L. Waslander, "Path Following for a Class of Underactuated Systems Using Global Parameterization," in IEEE Access, vol. 8, pp. 34737-34749, 2020.
J. -T. Yu, "A Unified SO(3) Approach to the Attitude Control Design for Quadrotors," in IEEE Access, vol. 9, pp. 64871-64879, 2021.
F. Bullo and R. M. Murray, “Trajectory Tracking For Fully Actuated,” 1997 European Control Conference (ECC) 1-4 July 1997, Brussels, Belgium no. July, pp. 1–4, 1997.
M. Khanesar and E. Kayacan, “Controlling the pitch and yaw angles of a 2-dof helicopter using interval type-2 fuzzy neural networks,” in Recent Advances in Sliding Modes: From Control to Intelligent Mechatronics, ser. Studies in Systems, Decision and Control, X. Yu and M. Onder Efe, Eds. Springer International Publishing, 2015, vol. 24, pp. 349–370.
E. Kayacan and R. Maslim, "Type-2 Fuzzy Logic Trajectory Tracking Control of Quadrotor VTOL Aircraft with Elliptic Membership Functions," in IEEE/ASME Transactions on Mechatronics, vol. 22, no. 1, pp. 339-348, Feb. 2017.
H. Glida, L. Abdou and A. Chelihi, "Optimal Fuzzy Adaptive Backstepping Controller for Attitude Control of a Quadrotor Helicopter," 2019 International Conference on Control, Automation and Diagnosis (ICCAD), 2019, pp. 1-6.
S. Kamthan and H. Singh, "Hierarchical Fuzzy Logic for Multi-Input Multi-Output Systems," in IEEE Access, vol. 8, pp. 206966-206981, 2020.
T. Lee, “Geometric tracking control of the attitude dynamics of a rigid body on SO(3),” in Proceedings of American Control Conference, 2011, pp. 1200–1205.
T. Lee, M. Leok, N.H. McClamroch, “Geometric tracking control of a quadrotor UAV on SE(3),” Proceedings of IEEE Conference on Decision and Control, 2010, pp. 5420–5425.
Y. Yu, X. Ding, and J. J. Zhu, “Attitude tracking control of a quadrotor UAV in the exponential coordinates,” J. Franklin Inst., vol. 350, no. 8, pp. 2044–2068, 2013.
A. H. Ginting, O. Wahyunggoro, and A. I. Cahyadi, “Robust Proportional-Derivative Control on SO(3) to Compensate The Unknown Center of Gravity of Quadrotor,” Engineering Letters., vol 28, no. 2, pp. 359-370, 2020.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
