Synchronizing of Stabilizing Platform Mounted on a Two-Wheeled Robot
DOI:
https://doi.org/10.18196/jrc.26136Keywords:
PID controller, self-balancing, servo reference tracking, inertial measurement unitAbstract
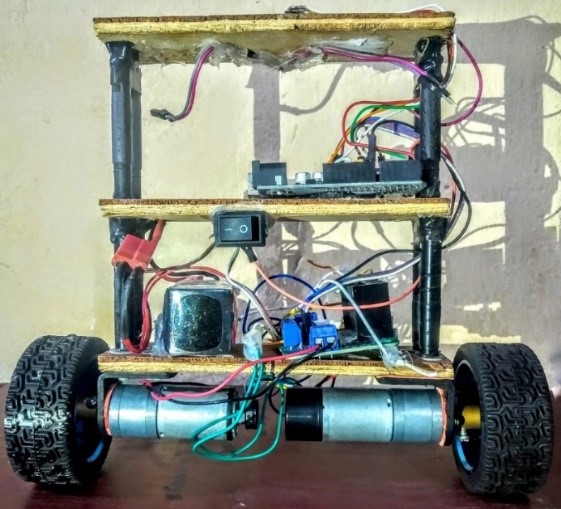
This paper represents the designing, building, and testing of a self-stabilizing platform mounted on a self-balancing robot. For the self-stabilizing platform, a servo motor is used and for the self-balancing robot, two dc motors are used with an encoder, inertial measurement unit, motor driver, an Arduino UNO microcontroller board. A PID controller is used to control the balancing of the system. The PID controller gains (Kp, Ki, and Kd) were evaluated experimentally. The value of the tilted angle from IMU was fed to the PID controller to control the actuated motors for balancing the system. For the self-stabilizing control part, whenever the robot tilted, it maintained the horizontal position by rotating that much in the opposite direction.References
V. Klemm et al., “Ascento: A Two-Wheeled Jumping Robot,” in 2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 7515–7521.
D. D. Fan et al., “Autonomous Hybrid Ground/Aerial Mobility in Unknown Environments,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 3070–3077.
K. Prakash and K. Thomas, “Study of controllers for a two wheeled self-balancing robot,” in 2016 International Conference on Next Generation Intelligent Systems (ICNGIS), 2016, pp. 1–7.
H. S. Zad, A. Ulasyar, A. Zohaib, and S. S. Hussain, “Optimal Controller Design for Self-Balancing Two-Wheeled Robot System,” in 2016 International Conference on Frontiers of Information Technology (FIT), 2016, pp. 11–16.
S. Hamatani, T. Nozaki, and T. Murakami, “Steering control in multi-degrees-of-freedom two-wheeled wheel chair on slope environment,” in IECON 2016 - 42nd Annual Conference of the IEEE Industrial Electronics Society, 2016, pp. 6181–6186.
C.-C. Tsai, Y.-X. Li, and F.-C. Tai, “Backstepping sliding-mode leader-follower consensus formation control of uncertain networked heterogeneous nonholonomic wheeled mobile multirobots,” in 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), 2017, vol. 2017-Novem, pp. 1407–1412.
N. Zheng, Y. Zhang, Y. Guo, and X. Zhang, “Hierarchical fast terminal sliding mode control for a self-balancing two-wheeled robot on uneven terrains,” in 2017 36th Chinese Control Conference (CCC), 2017, pp. 4762–4767.
D. Mohan and A. Vivek, “Navigation of two wheeled mobile robots cooperatively carrying an object,” in 2017 International Conference on Circuit ,Power and Computing Technologies (ICCPCT), 2017, pp. 1–7.
Y. Zhang, H. Huang, X. Yan, H. Tan, and S. Wu, “Inverse-free solution to inverse kinematics of two-wheeled mobile robot system using gradient dynamics method,” in 2016 3rd International Conference on Systems and Informatics (ICSAI), 2016, no. Icsai, pp. 126–132.
S.-M. Ben Mansour, J. Ghommam, and S.-M. Naceur, “Design and Visio control of Two-Wheeled Inverted Pendulum Mobile Robot,” in 2016 2nd International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), 2016, pp. 437–442.
X. Shi et al., “Low-cost map building and obstacle avoidance of miniature reconnaissance robot,” in 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2016, pp. 208–213.
Z. Zheng and M. Teng, “Modeling and Decoupling Control for Two-Wheeled Self-Balancing Robot,” in 2016 Chinese Control and Decision Conference (CCDC), 2016, pp. 5263–5267.
S. Yuan, G. Lei, and X. Bin, “Dynamic modeling and sliding mode controller design of a two-wheeled self-balancing robot,” in 2016 IEEE International Conference on Mechatronics and Automation, 2016, pp. 2437–2442.
H. Niu, N. Wang, and N. Li, “The adaptive control based on BP neural network identification for two-wheeled robot,” in 2016 12th World Congress on Intelligent Control and Automation (WCICA), 2016, vol. 2016-Septe, pp. 2437–2442.
Y. Tsurumoto, Y. Satoh, and H. Nakamura, “Static smooth path-following control Lyapunov function design via minimum projection method,” in 2017 56th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), 2017, vol. 2017-Novem, no. 7, pp. 214–219.
S. Paliwal, “Stabilization of Mobile Inverted Pendulum Using Fractional Order PID Controllers,” in 2017 International Conference on Innovations in Control, Communication and Information Systems (ICICCI), 2017, no. 1, pp. 1–4.
S. E. Ovur, F. Candan, A. Beke, and T. Kumbasar, “YAFT: A Fuzzy Logic based Real Time Two-Wheeled Inverted Pendulum Robot,” in 2018 6th International Conference on Control Engineering & Information Technology (CEIT), 2018, no. October, pp. 1–6.
C. Xiu, T. Lai, and Z. Chai, “Design of automatic handling robot control system,” in 2018 Chinese Control And Decision Conference (CCDC), 2018, pp. 1961–1965.
Q. Wang, W. Huang, B. Liu, and Y. Zhang, “An improved A∗ algorithm for path-planning of two-wheeled self-balancing vehicle,” in 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), 2018, pp. 841–846.
K. Kawaharazuka et al., “TWIMP: Two-Wheel Inverted Musculoskeletal Pendulum as a Learning Control Platform in the Real World with Environmental Physical Contact,” in 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), 2018, vol. 2018-Novem, pp. 784–790.
A. Chhotray, D. R. Parhi, R. Kundu, P. B. Kumar, and K. K. Pandey, “Modelling and Stability Analysis of a TWMM Using Kalman Filter and PID Controller,” in 2018 International Electrical Engineering Congress (iEECON), 2018, pp. 1–4.
P. Van Lam and Y. Fujimoto, “Two-Wheel Cane for Walking Assistance,” in 2018 International Power Electronics Conference (IPEC-Niigata 2018 -ECCE Asia), 2018, pp. 571–574.
A. I. Glushchenko, V. A. Petrov, and K. A. Lastochkin, “On Development of Neural Network Controller with Online Training to Control Two-Wheeled Balancing Robot,” in 2018 International Russian Automation Conference (RusAutoCon), 2018, no. 18, pp. 1–6.
A. Y. Ivoilov, V. A. Zhmud, V. G. Trubin, and H. Roth, “Using the Numerical Optimization Method for Tuning the Regulator Coefficients of the Two-Wheeled Balancing Robot,” in 2018 XIV International Scientific-Technical Conference on Actual Problems of Electronics Instrument Engineering (APEIE), 2018, pp. 228–236.
Z. Ma, O. Postolache, and Y. Yang, “Obstacle Avoidance for Unmanned Vehicle based on a 2D LIDAR,” in 2019 International Conference on Sensing and Instrumentation in IoT Era (ISSI), 2019, pp. 1–6.
T. Saito, R. Kikuchi, and T. Atsumi, “Optimization Method for Controller Parameters Using Support Vector Machine,” in 2019 IEEE International Conference on Industrial Technology (ICIT), 2019, vol. 2019-Febru, pp. 157–162.
M. F. Masrom, N. M. Ghani, N. F. Jamin, and N. A. A. Razali, “Motion Control of Triple Links Inverted Pendulum on Two-Wheeled System Using Interval Type-2 Fuzzy Logic Control Base on Particle Swarm Optimization,” in 2019 9th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), 2019, pp. 104–109.
F. Schiffer and M. Bragard, “Cascaded LQ and Field-Oriented Control of a Mobile Inverse Pendulum (Segway) with Permanent Magnet Synchronous Machines,” in 2019 20th International Conference on Research and Education in Mechatronics (REM), 2019, vol. 5, pp. 1–8.
R. C. Ooi, “Balancing a two-wheeled autonomous robot,” Final Year Thesis, The University of Western Australia, School of Mechanical Engineering, 2003.
Chih-Hui Chiu and Ya-Fu Peng, “Design and implement of the self-dynamic controller for two-wheel transporter,” 2006 IEEE International Conference on Fuzzy Systems, Vancouver, BC, 2006, pp. 480-483, DOI: 10.1109/FUZZY.2006.1681755.
S.W. Nawawi, M.N. Ahmad, and J.H.S. Osman, “Real-time control of two-wheeled inverted pendulum mobile robot,” World Academy of Science, Engineering and Technology, vol. 29, pp. 214 – 220, 2008.
J. Wu, W. Zhang, S. Wang, “A Two-wheeled self-balancing robot with the fuzzy PD control method”, Mathematical Problems in Engineering, vol. 2012, Article ID 469491, pp. 1-13, 2012. https://doi.org/10.1155/2012/469491
Lekshmy.S., A. George, and Athira C.V., “Self-balancing robot,” International Journal of Computer Engineering in Research Trends (IJCERT), vol. 2(12), pp. 1091-1095, Dec 2015.
M. Moghaddas, M.R. Dastranj, N. Changizi, and N. Khoori, “Design of optimal PID controller for inverted pendulum using genetic algorithm,” International Journal of Innovation, Management and Technology, vol. 3, No. 4, Aug 2012.
U. Adeel, K.S. Alimgeer, O. Inam, A. Hameed, M. Qureshi, and M. Ashraf, “Autonomous dual-wheel self-balancing based on microcontroller,” Journal of Basic and Applied Scientific Research, Vol. 3(10), pp. 843-848, 2013
J. Kuruvilla, J. Abraham, S. Midrun, R. Kumuath, and R. R. Paul, “Two Wheeled Self Balancing Robot for Autonomous Navigation,” International Journal of Electrical Engineering & Technology (IJEET), Vol. 5(8), pp. 13-20, Aug 2014.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
