
Self-Balancing Robot Navigation
Abstract
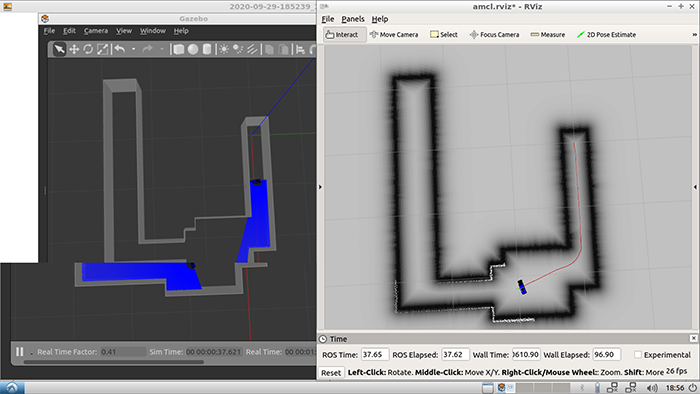
Human activity has been increasing, to support the activity, people in the modern era create robots to replace some human activities. The interest in two-wheeled balance robots has continued to increase, this is because it is highly maneuverable, making it efficient for use in various areas. In this study, the online navigation of a two-wheeled self-balancing robot is done. The connection between the robot and online navigation is using a Wi-Fi connection. The world model base on the real room is created by Gazebo and then visualized in RVIZ. The map creation and navigation process are handled by the package provided by ROS. The results of the simulation and real tracking show that the robot can move from the starting point to the destination point in either a straight or a curved path. The difference of the final position of the robot between simulation and real tracking is only (15.4 cm, 4 cm) and (9.6 cm, 43 cm) for the straight and curved path. This result proved that online navigation can be used to navigate an autonomous robot without real navigation sensors.
Keywords
Full Text:
PDFReferences
A. Latif, K. Shankar, P. T. Nguyen, U. Islam, and S. Agung, “Legged Fire Fighter Robot Movement Using PID 1,” J. Robot. Control, vol. 1, no. 1, pp. 15–18, 2020.
R. Ping, M. Chan, K. A. Stol, and C. R. Halkyard, “Annual Reviews in Control Review of modelling and control of two-wheeled robots,” Annu. Rev. Control J., vol. 37, pp. 89–103, 2013.
G. Song, L. Sun, and X. Yang, “Design and Implementation of Self-balancing and Navigation Robot Based on ROS System,” Proc. 31st Chinese Control Decis. Conf. CCDC 2019, pp. 5597–5602, 2019.
H. Bin, L. W. Zhen, and L. H. Feng, “The Kinematics Model of a Two-wheeled Self-balancing Autonomous Mobile Robot and Its Simulation,” pp. 64–68, 2010.
C. Hsu, C. Su, W. Kao, and B. Lee, “VISION-BASED LINE-FOLLOWING CONTROL OF A TWO-WHEEL SELF-BALANCING ROBOT,” 2018 Int. Conf. Mach. Learn. Cybern., vol. 1, pp. 319–324.
H. Ferdinando, H. Khoswanto, and S. Tjokro, “Design and Evaluation of Two-wheeled Balancing Robot Chassis.”
Nawawi;, Ahmad;, and Osman;, “Real-Time Control System for a Two-Wheeled Inverted Pendulum Mobile Robot,” Adv. Knowl. Appl. Pract., 2010.
S. Xin, M. Gong, Y. Sun, and Z. Zhang, “Control system design for two-wheel self-balanced robot based on Fuzzy-PD control,” 5th Int. Conf. Intell. Control Inf. Process. ICICIP 2014 - Proc., pp. 169–174, 2015.
G. R. Yu, Y. K. Leu, and H. T. Huang, “PSO-based fuzzy control of a self-balancing two-wheeled robot,” IFSA-SCIS 2017 - Jt. 17th World Congr. Int. Fuzzy Syst. Assoc. 9th Int. Conf. Soft Comput. Intell. Syst., pp. 1–5, 2017.
R. Zhang, G. Xiong, C. Cheng, X. Shang, Y. Ma, and Z. Lu, “Control System Design for Two-Wheel Self-Balanced Robot Based on the Stepper Motor,” in Proceedings of 2013 IEEE International Conference on Service Operations and Logistics, and Informatics, 2013, pp. 241–244.
T. A. Mai, D. N. Anisimov, T. S. Dang, and E. Fedorova, “Fuzzy-PID Controller for Two Wheels Balancing Robot Based on STM32 Microcontroller,” Proc. - 2019 Int. Conf. Eng. Technol. Comput. Sci. Innov. Appl. EnT 2019, pp. 20–24, 2019.
R. C. Ooi, “Balancing a Two-Wheeled Autonomous Robot,” 2003.
K. M. Mithil, G. S. Thejas, S. K. Ramani, and S. S. Iyengar, “A Low Cost Multi Sensorial Data Fusion for High Speed Obstacle Avoidance Using 3-D Point Clouds and Image Processing in Self Balancing Robots,” 2017 2nd Int. Conf. Emerg. Comput. Inf. Technol. ICECIT 2017, pp. 1–9, 2018.
J. Wu and W. Zhang, “Design of fuzzy logic controller for two-wheeled self-balancing robot,” Proc. 6th Int. Forum Strateg. Technol. IFOST 2011, vol. 2, pp. 1266–1270, 2011.
J. Wu, Y. Liang, and Z. Wang, “A robust control method of two-wheeled self-balancing robot,” Proc. 6th Int. Forum Strateg. Technol. IFOST 2011, vol. 2, pp. 1031–1035, 2011.
H. Ferdinando, H. Khoswanto, D. Purwanto, and S. Tjokro, “Design and evaluation of two-wheeled balancing robot chassis: Case study for Lego bricks,” INISTA 2011 - 2011 Int. Symp. Innov. Intell. Syst. Appl., pp. 514–518, 2011.
P. Govardhan, A. Thakre, N. Shende, N. Phadnis, and S. Muley, “Survey on Self Balancing Two Wheel Electric Prototype,” Int. J. Eng. Res. Gen. Sci., vol. 5, no. 5, pp. 32–36, 2017.
H. Ying, G. Yang, H. Lan, and L. Yunbo, “Design and implementation of a multifunctional self-balancing mobile platform,” Proc. 2015 27th Chinese Control Decis. Conf. CCDC 2015, pp. 5693–5697, 2015.
V. Coelho, S. Liew, K. Stol, and G. Liu, “Development of a Mobile Two-Wheel Balancing Platform for Autonomous Applications,” in 15th International Conference on Mechatronics and Machine Vision in Practice, 2008, pp. 2–4.
R. S. Martins and F. Nunes, “Control System for a Self-Balancing Robot,” no. Project I, pp. 297–302, 2017.
C. F. Hsu, C. T. Su, W. F. Kao, and B. K. Lee, “Vision-Based Line-Following Control of a Two-Wheel Self-Balancing Robot,” Proc. - Int. Conf. Mach. Learn. Cybern., vol. 1, pp. 319–324, 2018.
O. Y. Chee and M. S. B. Zainal Abidin, “Design and development of two wheeled autonomous balancing robot,” SCOReD 2006 - Proc. 2006 4th Student Conf. Res. Dev. "Towards Enhancing Res. Excell. Reg., no. SCOReD, pp. 169–172, 2006.
E. Philip and S. Golluri, “Implementation of an Autonomous Self-Balancing Robot Using Cascaded PID Strategy,” 2020.
C. H. G. Li and L. P. Zhou, “Training end-to-end steering of a self-balancing mobile robot based on RGB-D image and deep convNet,” IEEE/ASME Int. Conf. Adv. Intell. Mechatronics, AIM, vol. 2020-July, pp. 898–903, 2020.
X. Ruan and W. Li, “Ultrasonic Sensor Based Two-wheeled Self-balancing Robot Obstacle Avoidance Control System,” in Proceedings of 2014 IEEE International Conference on Mechatronics and Automation, 2014, pp. 896–900.
C. Iwendi, M. A. Alqarni, J. H. Anajemba, A. S. Alfakeeh, Z. Zhang, and A. K. Bashir, “Robust Navigational Control of a Two-Wheeled Self- Balancing Robot in a Sensed Environment,” IEEE Access, vol. 7, 2019.
N. Maniha, A. Ghani, F. Naim, and T. P. Yon, “Two Wheels Balancing Robot with Line Following Capability,” Int. J. Mech. Mechatronics Eng., vol. 5, no. 7, 2011.
S. Gatesichapakorn, J. Takamatsu, and M. Ruchanurucks, “ROS based Autonomous Mobile Robot Navigation using 2D LiDAR and RGB-D Camera,” 2019 1st Int. Symp. Instrumentation, Control. Artif. Intell. Robot. ICA-SYMP 2019, pp. 151–154, 2019.
F. Okumus and A. F. Kocamaz, “Cloud based indoor navigation for ros-enabled automated guided vehicles,” 2019 Int. Conf. Artif. Intell. Data Process. Symp. IDAP 2019, pp. 1–4, 2019.
R. Kannan Megalingam, C. Ravi Teja, S. Sreekanth, and A. Raj, “ROS based Autonomous Indoor Navigation Simulation Using SLAM Algorithm,” Int. J. Pure Appl. Math., vol. 118, no. 7, pp. 199–205, 2018.
R. K. Megalingam, “Comparison of Planned Path and Travelled Path Using ROS Navigation Stack,” pp. 1–6, 2020.
K. Takaya, T. Asai, V. Kroumov, and F. Smarandache, “Simulation Environment for Mobile Robots Testing Using ROS and Gazebo,” pp. 96–101, 2016.
DOI: https://doi.org/10.18196/jrc.25115
Refbacks
- There are currently no refbacks.
Copyright (c) 2020 Journal of Robotics and Control (JRC)

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Journal of Robotics and Control (JRC)
P-ISSN: 2715-5056 || E-ISSN: 2715-5072
Organized by Peneliti Teknologi Teknik Indonesia
Published by Universitas Muhammadiyah Yogyakarta in collaboration with Peneliti Teknologi Teknik Indonesia, Indonesia and the Department of Electrical Engineering
Website: http://journal.umy.ac.id/index.php/jrc
Email: jrcofumy@gmail.com