Modeling of 2-DOF Hexapod Leg Using Analytical Method
DOI:
https://doi.org/10.18196/jrc.25119Keywords:
Degree Of Freedom, 2-DOF hexapod leg, kinematic model analytical approachAbstract
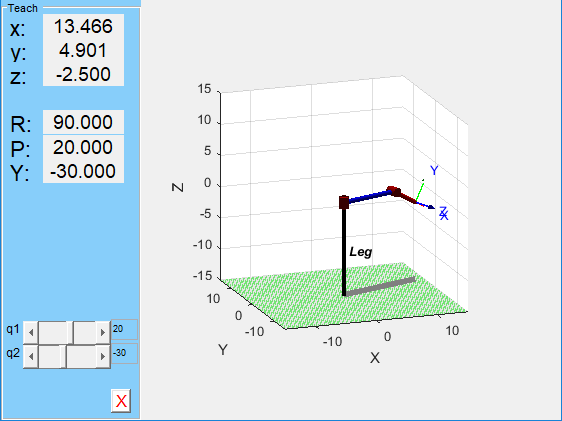
Walking robot is one type of mobile platform that has locomotion type "walking." DOF (Degree Of Freedom) is one of essential character for the design of robot mechanism based on its models. Legs are the critical parts of the walking robot structure. The legged robot is the walking robot biologically adopted from animal or insect behavior, especially in their walking routine. The hexapod robot is one of the most statically stable legged robots and has high flexibility when standing or moving which supported by six legs that can be easily manipulated. For modeling needs and its validation, it is desirable to control each DOF in the space of Cartesian coordinate although motor system needs the reference inputs in the joint space. In this case, it needs to know the conversion between Cartesian and joint space, inverse, and forward kinematics. This study presents a kinematic model of the 2-DOF hexapod leg. This study aimed to build a kinematic model of the 2-DOF hexapod leg using an analytical approach. Analytically, the working mechanism of the robot can be modeled using forward and inverse kinematic models. In this method, this modeling is derived mathematically from the projection analysis of the movement in a certain coordinate space. The model validation was performed using the MATLAB tool and the Robotic Toolbox. The results of this study showed that the results of the inverse kinematic process have the same output signal pattern compare to the input signal pattern of the forward kinematic process.References
Rubio F, Valero F, Llopis-Albert C. “A review of mobile robots: Concepts, methods, theoretical framework, and applications”, International Journal of Advanced Robotic Systems. March 2019.
S. Basu, A. Omotubora, M. Beeson, and C. Fox, "Legal framework for small autonomous agricultural robots," Ai & Society, 2018.
E. Vlasceanu, D. Popescu and L. Ichim, "Aerial Robotic Team for Complex Monitoring in Precision Agriculture," 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 2019.
J. Dentler, S. Kannan, S. Bezzaoucha, M. A. Olivares-Mendez, and H. Voos, "Model predictive cooperative localization control of multiple UAVs using potential function sensor constraints," Autonomous Robots, 2018.
M. L. Ireland and D. Anderson, "Optimisation of Trajectories for Wireless Power Transmission to a Quadrotor Aerial Robot," Journal of Intelligent & Robotic Systems, 2018.
C. Sampedro et al., "A fully-autonomous aerial robotic solution for the 2016 International Micro Air Vehicle competition," International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 2017.
A. Rodriguez-Ramos, C. Sampedro, H. Bavle, Z. Milosevic, A. Garcia-Vaquero and P. Campoy, "Towards fully autonomous landing on moving platforms for rotary Unmanned Aerial Vehicles," International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 2017.
A. U. Shamsudin, K. Ohno, R. Hamada, S. Kojima, T. Westfechtel, T. Suzuki, Y. Okada, S. Tadokoro, J. Fujita, and H. Amano, "Consistent map building in petrochemical complexes for firefighter robots using SLAM based on GPS and LIDAR," ROBOMECH Journal, vol. 5, 2018.
H.-S. Shin, A. F. Antoniadis, and A. Tsourdos, "Parametric Study on Formation Flying Effectiveness for a Blended-Wing UAV," Journal of Intelligent & Robotic Systems, 2018.
M. M. Ali, A. A. Abdulla, N. Stoll, and K. Thurow, "Mobile Robot Transportation for Multiple Labware with Hybrid Pose Correction in Life Science Laboratories," Journal of Automation, Mobile Robotics & Intelligent Systems, vol. 11, 2018.
A. Latif, K. Shankar, P. Thanh Nguyen, "Legged Fire Fighter Robot Movement Using PID" Jurnal of Robotic and Control, Vol 1, Issue 1, 2020.
A. Latif, A. Widodo, R. Rahim, K. Kunal, "Implementation of Line Follower Robot based Microcontroller ATMega32A", Journal of Robotics and Control, Vol 1, No 2, March 2020.
A. M. Martins, P. J. Alsina and R. C. Pereira, "Planar target following control scheme based on path generation for nonholonomic terrestrial robots," Latin American Robotics Symposium (LARS) and Brazilian Symposium on Robotics (SBR), Curitiba, 2017.
S. Sendari, M. S. Hadi, A. N. Handayani, Y. R. Wahyudi and H. Lin, "Implementation of PD (Proportional Derivative) Control System On Six-Legged Wall Follower Robot," International Automatic Control Conference (CACS), Taoyuan, 2018.
L. V. Kiselev, A. V. Medvedev, V. B. Kostousov and A. E. Tarkhanov, "Autonomous underwater robot as an ideal platform for marine gravity surveys," 24th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, 2017.
M. Kim, G. R. Cho, H. Kang, S. C. Jee and J. Li, "Prototype development of underwater vehicle overcoming strong current," 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, 2017.
J. Wampler, B. Li, T. Mosciki, and K. D. v. Ellenrieder, "Towards Adjustable Autonomy for Human-Robot Interaction in Marine Systems," IEEE Transaction, 2017.
S. Chaure, P. Chavan, S. Dhavale, and V. B. Jagtap, "Underwater Metal Detecting Robot using Wireless Communication," International Journal Of Innovations In Engineering Research And Technology [Ijiert], vol. 4, pp. 16-21, 2017.
J. A. M. Anieva, T. S. Jimenez, L. G. G. Valdovinos, L. N. Balanzar and J. P. O. Muniz, "Design, Modeling and Control of a Micro AUV," OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, pp. 1-7, 2018
M. Dong, W. Chou, and B. Fang, "Vertical Motion Control of Underwater Robot Based on Hydrodynamics and Kinematics Analysis," IEEE Transaction, 2017.
L. Furno, M. Blanke, R. Galeazzi, and D. J. Christensen, "Self-reconfiguration of modular underwater robots using an energy heuristic," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 2017.
R. Sundar, M. Dheepak, and P. V. Kumar, "PC Based Remote Operated Underwater Vehicle for Marine Surveillance," International Journal of Civil Engineering and Technology (IJCIET), vol. 8, pp. 716-721, 2017.
A. C. Viñas, "Robot Learning applied to Autonomous Underwater Vehicles for intervention tasks," Doctoral Program, Doctoral Program in Technology, University of Girona, Girona, 2017.
D. Xi and F. Gao, "Type Synthesis of Walking Robot Legs," Chinese Journal of Mechanical Engineering, vol. 31, 2018.
Q. Hidayati, F. Z. Rachman, N. Yanti, “Intelligent Control System of Fire-Extinguishing and Obstacle-Avoiding Hexapod Robot,” Kinetik. Vol 3, No 1, 2018
R. Pavan, T. Robin, C. Raphael, A. Thibault, B. Richard, A. Jan, Ijspeert, A.J, F. Dario, “Climbing favours the tripod gait over alternative faster insect gaits.” Nature Communications, 2017.
A. Papacharalampopoulos, P. Aivaliotis, and S. Makris, "Simulating robotic manipulation of cabling and interaction with surroundings," The International Journal of Advanced Manufacturing Technology, vol. 96, pp. 2183-2193, 2018.
J. D. Barnfather, M. J. Goodfellow, and T. Abram, "Achievable tolerances in robotic feature machining operations using a low-cost hexapod," The International Journal of Advanced Manufacturing Technology, vol. 95, pp. 1421-1436, 2017.
A. Patil, M. Kulkarni, and A. Aswale, "Analysis of the inverse kinematics for 5 DOF robot arm using D-H parameters," in Conference on Real-time Computing and Robotics, Okinawa, Japan, 2017.
E. Bjoerlykhaug, "A Closed Loop Inverse Kinematics Solver Intended for Offline Calculation Optimized with GA," Robotics, vol. 7, p. 7, 2018.
J. Sun, G. Cao, W. Li, Y. Liang and S. Huang, "Analytical inverse kinematic solution using the D-H method for a 6-DOF robot," 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, 2017.
S. S. R. CH, S. Patlolla, A. Agrawal, and A. K. R., "HexaMob—A Hybrid Modular Robotic Design for Implementing Biomimetic Structures," Robotics, vol. 6, p. 27, 2017.
G. R. U, D. A. A, P. S. S, E. S. B, and S. V. B, "Kinematics Analysis of Various Robot Configurations," International Research Journal of Engineering and Technology (IRJET) vol. 4, pp. 921-933, 2017.
S. Fuenzalida, K. Toapanta, J. Paillacho and D. Paillacho, "Forward and Inverse Kinematics of a Humanoid Robot Head for Social Human Robot-Interaction," IEEE Fourth Ecuador Technical Chapters Meeting (ETCM), Guayaquil, Ecuador, 2019.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
