Design and Programming of 5 Axis Manipulator Robot with GrblGru Open Source Software on Preparing Vocational Students’ Robotic Skills
DOI:
https://doi.org/10.18196/jrc.26134Abstract
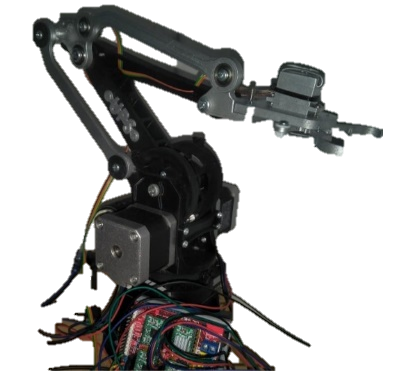
The rapid development of technology at the end of this decade, the industrial world is changing the human resources they have using the help of robot technology. The use of a robot was chosen because of the accuracy and precision that it can do in doing the job. In addition, robotic technology requires only one programming to do many things. Thus, there are many advantages for companies by using robotic technology in their production processes. This research aims to designing and building arm robot prototype to teach the robotics programming language. The result of this research is an arm robot prototype with Arduino Mega 2560 based programming. In addition, the robot movement programming uses the open source GrblGru software Grbl based. The GrblGru used for interpreting G-code and to convert pulse and direction information to control the stepper motor. This research concludes that there are 5 importance steps on develop the arm robot prototype, 1. Analyze; 2. Design; 3. Develop; 4. Evaluate; and 5. Implementation. With the GrblGru software the movements of arm robot prototype can work on simulation mode and control mode, there for students easier to study robotics programming language.References
K. Phasale et al., “Design , Manufacturing and Analysis of Robotic Arm with SCARA Configuration,” Int. Res. J. Eng. Technol., 2018.
Marsono, M. Sugandi, Tuwoso, and Purnomo, “Study the impact of internship on improving engineering students’ competency,” in AIP Conference Proceedings, 2017, vol. 1887, doi: 10.1063/1.5003547.
Marsono, “Development of a cooperative micro lesson study learning model to teaching creatively and teaching for the creativity of engineering students,” World Trans. Eng. Technol. Educ., vol. 14, no. 2, 2016.
T. B. Sheridan, “Human-Robot Interaction,” Human Factors. 2016, doi: 10.1177/0018720816644364.
T. Brogårdh, “Present and future robot control development-An industrial perspective,” Annu. Rev. Control, 2007, doi: 10.1016/j.arcontrol.2007.01.002.
S. Guo, T. Fukuda, and K. Asaka, “A new type of fish-like underwater microrobot,” IEEE/ASME Trans. Mechatronics, 2003, doi: 10.1109/TMECH.2003.809134.
H. Hanafusa, modern robotics. 2017.
A. Cully, J. Clune, D. Tarapore, and J. B. Mouret, “Robots that can adapt like animals,” Nature, 2015, doi: 10.1038/nature14422.
J. H. Oh, D. Hanson, W. S. Kim, I. Y. Han, J. Y. Kim, and I. W. Park, “Design of android type humanoid robot Albert HUBO,” 2006, doi: 10.1109/IROS.2006.281935.
A. Ghanizadeh, A. H. Al-Hoorie, and S. Jahedizadeh, “Mindfulness,” in Second Language Learning and Teaching, 2020.
J. Andrew Bagnell, “Reinforcement Learning in Robotics: A Survey,” in Springer Tracts in Advanced Robotics, 2014.
A. L. Thomaz and C. Breazeal, “Teachable robots: Understanding human teaching behavior to build more effective robot learners,” Artif. Intell., 2008, doi: 10.1016/j.artint.2007.09.009.
O. Mubin, C. J. Stevens, S. Shahid, A. Al Mahmud, and J.-J. Dong, “A Review of The Applicability of Robots in Education,” Technol. Educ. Learn., 2013, doi: 10.2316/journal.209.2013.1.209-0015.
V. Paramasivam, J. Huang, S. Elliott, and M. Cakmak, “Computer science outreach with end-user robot-programming tools,” 2017, doi: 10.1145/3017680.3017796.
L. Mottola, K. Whitehouse, and C. Ghezzi, “Poster abstract: Towards spatial macroprogramming for sensing and actuating robot swarms,” 2013, doi: 10.1145/2517351.2517407.
S. Jeon, “GRBL Wiki,” GRBL Wiki - github.com, 2011. .
A. M. A. Ghiet and A. Baba, “Robot Arm Control with Arduino,” Univ. Turkish Aeronaut. Assoc., 2017.
T. Vignesh, R. Nivetha, G. Mowneka, and D. Selvakumar, “Design and Fabrication of 6-axis Gesture Controlled Robot,” 2019, doi: 10.1109/ICACCS.2019.8728465.
R. M. Murray, Z. Li, S. S. Sastry, R. M. Murray, Z. Li, and S. S. Sastry, “Robot Dynamics and Control,” in A Mathematical Introduction to Robotic Manipulation, 2018.
F. L. Lewis, D. M. Dawson, and C. T. Abdallah, Robot Manipulator Control. Theory and Practice. 2004.
L. Jin, S. Li, J. Yu, and J. He, “Robot manipulator control using neural networks: A survey,” Neurocomputing, 2018, doi: 10.1016/j.neucom.2018.01.002.
S. S. Skogsrud, “Grbl,” Choosing a controller, 2009. .
A. R. Sonawane, A. B. Rane, and D. S. S. Sudhakar, “Development of A3-Axis Cnc Milling Machine With an Open Source Controller,” Int. J. Res. Eng. Technol., 2017, doi: 10.15623/ijret.2017.0608002.
Gary. (GrblGru), “GrblGru - Operating Instructions,” 2020, [Online]. Available: https://cdn.website-editor.net/f7ae70c5e8d847db8c417786ea6ca337/files/uploaded/GrblGru%2520Manual.pdf.
N. Aldoobie, “ADDIE Model Analysis phase,” Am. Int. J. Contemp. Res., 2015.
F. Hishamudin, “Model ADDIE,” Universiti Teknologi Malaysia. 2016.
R. M. Shor, “ADDIE+: Adopting proven practices from the IT industry,” T D, 2012.
X. Zheng et al., “G-code,” Forbes, 2016.
T. Loveland, “Understanding and Writing G & M Code for CNC Machines,” Technol. Eng. Teach., 2012.
B. Jayachandraiah, O. V. Krishna, P. A. Khan, and R. A. Reddy, “Fabrication of Low Cost 3-Axis Cnc Router,” Int. J. Eng. Sci. Invent., 2014.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
