Implementation Kinematics Modeling and Odometry of Four Omni Wheel Mobile Robot on The Trajectory Planning and Motion Control Based Microcontroller
DOI:
https://doi.org/10.18196/jrc.25121Keywords:
Omni Wheel Mobile Robot, Kinematics, Modeling, Odometry, Trajectory, Motion ControlAbstract
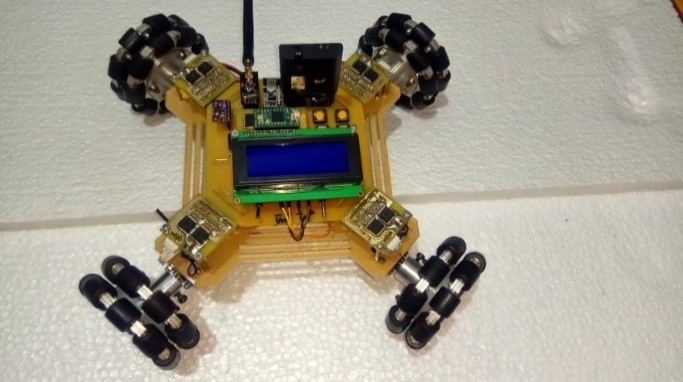
The control of kinematic modeling in a four wheel omni-directional robot (FWOR) is very difficult. Because you have to adjust the speed of the four DC motors. The speed of DC motors is controlled so that the FWOR robot can be controlled. This paper will explain the application of kinematic modeling of four wheel omni directional robots as track tracking controllers and microcontroller based movement control. Kinematic is the study of robot motion based on geometric structure analysis of a stationary / moving reference coordinate frame system without considering the force, torque or certain moments that cause movement. By applying kinematic modeling and calculation of the odometric system as feedback, the control of the robot trajectory movement can be controlled with precision in accordance with the path planning that has been made. The robot track control technique is embedded in a 32-bit ARM microcontroller. The path planning system and observing robot movement are carried out using a friendly graphic interface using Processing to facilitate the robot monitoring process. The results of the experiments and tests carried out, the system is able to control the rate of movement of the robot with great precision in accordance with the path planning made.
References
P. Van Lam and Y. Fujimoto, “A Robotic Cane for Balance Maintenance Assistance,” IEEE Trans. Ind. Informatics, vol. 15, no. 7, pp. 3998–4009, Jul. 2019.
C. Cai, J. Lu, and Z. Li, “Kinematic Analysis and Control Algorithm for the Ballbot,” IEEE Access, vol. 7, pp. 38314–38321, 2019.
W. Li and R. Xiong, “Dynamical Obstacle Avoidance of Task- Constrained Mobile Manipulation Using Model Predictive Control,” IEEE Access, vol. 7, pp. 88301–88311, 2019.
M. Ferro, A. Paolillo, A. Cherubini, and M. Vendittelli, “Vision-Based Navigation of Omnidirectional Mobile Robots,” IEEE Robot. Autom. Lett., vol. 4, no. 3, pp. 2691–2698, Jul. 2019.
T. Terakawa, M. Komori, K. Matsuda, and S. Mikami, “A Novel Omnidirectional Mobile Robot With Wheels Connected by Passive Sliding Joints,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 4, pp. 1716–1727, Aug. 2018.
B. A. Gebre and K. V. Pochiraju, “Machine Learning Aided Design and Analysis of a Novel Magnetically Coupled Ball Drive,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 5, pp. 1942–1953, Oct. 2019.
P. Shen, X. Zhang, and Y. Fang, “Complete and Time-Optimal Path-Constrained Trajectory Planning With Torque and Velocity Constraints: Theory and Applications,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 2, pp. 735–746, Apr. 2018.
M. A. Al Mamun, M. T. Nasir, and A. Khayyat, “Embedded System for Motion Control of an Omnidirectional Mobile Robot,” IEEE Access, vol. 6, no. 8, pp. 6722–6739, 2018.
Y. Fei and H. Xu, “Modeling and Motion Control of a Soft Robot,” IEEE Trans. Ind. Electron., vol. 64, no. 2, pp. 1737–1742, Feb. 2017.
M. Thor and P. Manoonpong, “A Fast Online Frequency Adaptation Mechanism for CPG-Based Robot Motion Control,” IEEE Robot. Autom. Lett., vol. 4, no. 4, pp. 3324–3331, Oct. 2019.
B. Ren, Y. Wang, and J. Chen, “A Novel Robust Finite-Time Trajectory Control With the High-Order Sliding Mode for Human–Robot Cooperation,” IEEE Access, vol. 7, pp. 130874–130882, 2019.
H. Chang, S. J. Kim, and J. Kim, “Feedforward Motion Control With a Variable Stiffness Actuator Inspired by Muscle Cross-Bridge Kinematics,” IEEE Trans. Robot., vol. 35, no. 3, pp. 747–760, Jun. 2019.
J. Chi, H. Yu, and J. Yu, “Hybrid Tracking Control of 2-DOF SCARA Robot via Port-Controlled Hamiltonian and Backstepping,” IEEE Access, vol. 6, pp. 17354–17360, 2018.
F. Angelini et al., “Decentralized Trajectory Tracking Control for Soft Robots Interacting With the Environment,” IEEE Trans. Robot., vol. 34, no. 4, pp. 924–935, Aug. 2018.
L. Ge, H. Wang, and J. Xing, “Maintenance robot motion control based on Kinect gesture recognition,” J. Eng., vol. 2019, no. 23, pp. 8794–8796, Dec. 2019.
S. Verma, D. Shen, and J. Xu, “Motion Control of Robotic Fish Under Dynamic Environmental Conditions Using Adaptive Control Approach,” IEEE J. Ocean. Eng., vol. 43, no. 2, pp. 381–390, Apr. 2018.
A. Magassouba, N. Bertin, and F. Chaumette, “Exploiting the Distance Information of the Interaural Level Difference for Binaural Robot Motion Control,” IEEE Robot. Autom. Lett., vol. 3, no. 3, pp. 2048–2055, Jul. 2018.
H. Ashrafiuon, S. Nersesov, and G. Clayton, “Trajectory Tracking Control of Planar Underactuated Vehicles,” IEEE Trans. Automat. Contr., vol. 62, no. 4, pp. 1959–1965, Apr. 2017.
Q. Zheng, Y. He, X. Qi, P. Zhang, Y. Hu, and B. Li, “Safety Tracking Motion Control Based on Forbidden Virtual Fixtures in Robot Assisted Nasal Surgery,” IEEE Access, vol. 6, no. c, pp. 44905–44916, 2018.
Z. Sun, Y. Xia, L. Dai, K. Liu, and D. Ma, “Disturbance Rejection MPC for Tracking of Wheeled Mobile Robot,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 6, pp. 2576–2587, Dec. 2017.
D. Nakhaeinia, P. Payeur, and R. Laganiere, “A Mode-Switching Motion Control System for Reactive Interaction and Surface Following Using Industrial Robots,” IEEE/CAA J. Autom. Sin., vol. 5, no. 3, pp. 670–682, May 2018.
Z. Zhang, J. Dequidt, J. Back, H. Liu, and C. Duriez, “Motion Control of Cable-Driven Continuum Catheter Robot Through Contacts,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 1852–1859, Apr. 2019.
Y. Huang, D. M. Pool, O. Stroosma, and Q. Chu, “Long-Stroke Hydraulic Robot Motion Control With Incremental Nonlinear Dynamic Inversion,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 1, pp. 304–314, Feb. 2019.
J. Yu, Z. Wu, Z. Su, T. Wang, and S. Qi, “Motion Control Strategies for a Repetitive Leaping Robotic Dolphin,” IEEE/ASME Trans. Mechatronics, vol. 24, no. 3, pp. 913–923, Jun. 2019.
M. Bjelonic et al., “Keep Rollin’—Whole-Body Motion Control and Planning for Wheeled Quadrupedal Robots,” IEEE Robot. Autom. Lett., vol. 4, no. 2, pp. 2116–2123, Apr. 2019.
T. Salumae, A. Chemori, and M. Kruusmaa, “Motion Control of a Hovering Biomimetic Four-Fin Underwater Robot,” IEEE J. Ocean. Eng., vol. 44, no. 1, pp. 54–71, Jan. 2019.
R. A. S. Fernandez, Z. Milosevic, S. Dominguez, and C. Rossi, “Motion Control of Underwater Mine Explorer Robot UX-1: Field Trials,” IEEE Access, vol. 7, pp. 99782–99803, 2019.
H. Chang, S. Wang, and P. Sun, “Omniwheel Touchdown Characteristics and Adaptive Saturated Control for a Human Support Robot,” IEEE Access, vol. 6, pp. 51174–51186, 2018..
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
