Development of a Prototype Autonomous Electric Vehicle
DOI:
https://doi.org/10.18196/jrc.26137Keywords:
Autonomous electric vehicle, Ultrasonic sensors, Arduino microcontroller, Gps navigation, Rechargeable batteriesAbstract
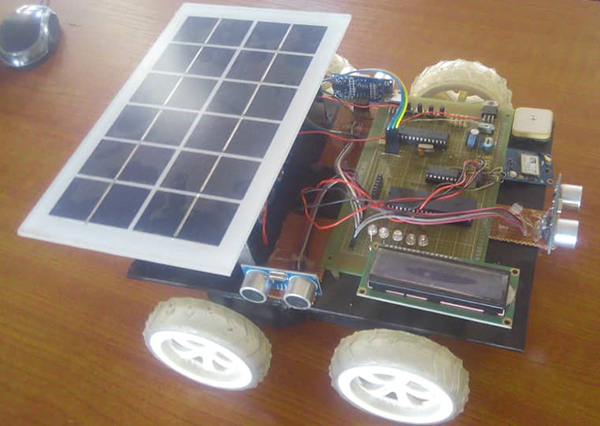
The paper presents an Autonomous Electric Vehicle with obstacle avoidance system. This research work made use of ultrasonic sensors, the principle of distance measurements and calculations as well as detecting obstacle on its path. The device consists of three ultrasonic sensors that detect object for each left, right and front of the vehicle, based on developed and installed codes in the Arduino microcontroller and displays the range using ISIS Proteus 8 electronic modelling software. The minimum and maximum range of object detections is 2cm to 400cm respectively. However, the measured distance was from 25cm to 150cm and the corresponding calculated distances using oscilloscope waveforms are 28.10cm and 148.3cm. The difference between the measured and calculated distance was 5.4% on average. GPS navigates the vehicle autonomously to its destination using an algorithm for navigation based on reactive behavior. The vehicle is powered by rechargeable batteries (4 lithium ion batteries) which are charged using external power source by connecting into electricity grid. Furthermore, a solar panel has been utilized as a secondary source of power to charge the batteries. This reduces the dependency of the vehicle on external power sources. The vehicle is capable of moving for about 20m to and fro and avoiding obstacle on its path.References
T.Raviteja, “An Introduction of Autonomous Vehicles and a Brief Survey”, Journal of Critical Reviews, vol. 7, no. 13, Pp 196-202, 2020.
A.Faisal et al, “Understanding Autonomous Vehicles: A systematic literature review on capability, impact, planning and policy”, The Journal of Transport and Land Use, vol. 12, no. 1, Pp 45-72, 2019.
S.D. Pendleton et al, Perception, Planning, Control, and Coordination for Autonomous Vehicles, 2017.
L.Porter, “The Autonomous Vehicle Revolution: Implication for Planning”, Planning Theory & Practice Journal , vol. 19, no. 5, Pp 753-778, 2018.
E.Frazzoli, et al, “Real-Time Motion Planning for Agile Autonomous Vehicles”, Journal of Guidance, Control, and Dynamic, vol. 25, no. 1, Pp 116, 2002.
R.Bansal, Electric Vehicles, Department of Electrical, Electronics and Computer Engineering, Birla Institute of Technology and Science, Pilani India. 2005.
M.Parent, “Advance Urban Transport: Automation is on the Way”, IEEE Intelligent System”, vol. 22(2), 2007.
J.Perez, V. Milanes, E. Onieva, “Cascade Architecture for Lateral Control in Autonomous Vehicles”, IEEE Transaction on Intelligent Transportation System ”, vol. 12(1), Pp 73-82, 2011.
C.Urmson, et al, “Autonomous Driving in Urban Environment: Boss and the Urban Challenge”, Journal of Field Robotics: Special Issues on the 2007 DARPA Urban Challenge, Pp 425-466, 2008.
S.Thrun, et al, “Winning the DARPA Grand Challenge”, Journal of Field Robotics, 2006.
I.Unal and M. Topakci, “Design of a Remote-controlled and GPS-guided Autonomous Robot for Precision Farming”, International Journal of Advance Robotic Systems, vol. 12, no. 194, 2015.
I.Kaminer et al, “Trajectory Tracking for Autonomous Vehicles: An Integrated Approach to Guidance and Control”, Journal of Guidance, Control and Dynamics, vol. 21, no. 1, Pp 29-38, 1998.
O.Ohno, et al, “An Investigation into the long-term Excessive Deflection of PC Via”, International Journal of Advance Robotic Systems, vol. 12, no. 194, 2015.
A.El-Rabbany, Introduction to GPS: the Global Positioning System, 2nd Edition, Boston, 2006.
O.M. Cristina,“Autonomous Vehicles and Smart Mobility Related Technologies”, Info communications Journal, , Volume VIII, Number. 2, Pp 21, 2016.
H.Ejaz, “GPS Based Navigation and Collision Avoidance using Ultrasonic Sensors and Image Processing for Autonomous Vehicle”, International Journal of Computer and Electronics Research, Vol. 3, Issue 4, August 2014.
C. Fernadez, R. Dominguez, D. Fernandez-l-lorca and Miquel A., “Autonomous Navigation and Obstacle Avoidance of a Micro-Bus”, International Journal of Advanced Robotic system, 2013
I.Yub Kim et al, “Development of Intelligent Electric Vehicle for Study of Unmanned Autonomous Driving Algorithm”, World Electric Vehicle Journal, Vol. 6, 2013.
G. Leung et al, “Autonomous Smart Car”, University of Victoria, 2005.
A.Flah, S. Lassad, C. Mahmud, “Overview of Electric Vehicle Concepts and Power Management Strategies”, International Conference of Science and Electrical Technologies of Maghreb, CISTEM2014, Tunisia. 2014.
K. Tiwari, X. Xiao, A. Malik, and N. Y. Chong, “A unified framework for operational range estimation of mobile robots operating on a single discharge to avoid complete immobilization,” Mechatronics, vol. 57, no. December 2018, pp. 173–187, Feb. 2019.
Y. HU, J. HAO, W. YANG, C. GUO, and P. JIANG, “Motion point calculation method for robortic Ultrasonic Nondestructive Testing,” in 2018 IEEE Far East NDT New Technology & Application Forum (FENDT), 2018, pp. 85–89.
R. R. Dam, H. Biswas, S. Barman, and A.-Q. Ahmed, “Determining 2D shape of object using ultrasonic sensor,” in 2016 3rd International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), 2016, pp. 1–5.
R. Wang, L. Chen, J. Wang, P. Zhang, Q. Tan, and D. Pan, “Research on autonomous navigation of mobile robot based on multi ultrasonic sensor fusion,” in 2018 IEEE 4th Information Technology and Mechatronics Engineering Conference (ITOEC), 2018, no. Itoec, pp. 720–725.
R. Bahri, R. Boucetta, and S. Bel Hadj Ali Naoui, “An innovative ultrasonic position and velocity sensor for mobile robots,” in 2018 International Conference on Advanced Systems and Electric Technologies (IC_ASET), 2018, pp. 403–408.
Y. Liu et al., “Mobile Robot Localisation and Navigation Using LEGO NXT and Ultrasonic Sensor,” in 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2018, pp. 1088–1093.
Y. Shao, P. Chen, and T. Cao, “A Grid Projection Method Based on Ultrasonic Sensor for Parking Space Detection,” in IGARSS 2018 - 2018 IEEE International Geoscience and Remote Sensing Symposium, 2018, vol. 2018-July, pp. 3378–3381.
F. Y. C. Albert, C. H. S. Mason, C. K. J. Kiing, K. S. Ee, and K. W. Chan, “Remotely operated solar-powered mobile metal detector robot,” Procedia Comput. Sci., vol. 42, no. C, pp. 232–239, 2014.
K. Khade, R. Naik, and A. Patil, “Design of all color line follower sensor with auto calibration ability,” in 2017 7th International Symposium on Embedded Computing and System Design (ISED), 2017, vol. 2018-Janua, pp. 1–5.
H. U. Zaman, M. M. H. Bhuiyan, M. Ahmed, and S. . T. Aziz, “A novel design of line following robot with multifarious function ability,” in 2016 International Conference on Microelectronics, Computing and Communications (MicroCom), 2016, vol. 1, pp. 1–5.
A. Elawad, B. Hagadam, R. Hamed, and E. Hussein, “Design and implementation of robotic system to transport disabled people,” in 2013 INTERNATIONAL CONFERENCE ON COMPUTING, ELECTRICAL AND ELECTRONIC ENGINEERING (ICCEEE), 2013, pp. 530–534.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
