Optimal Robotic Path Planning Using Intelligents Search Algorithms
DOI:
https://doi.org/10.18196/jrc.26132Keywords:
Modified Fuzzy, Particle Swarm Optimization, Local Route Management, Intelligent Wireless Robot, Robot NavigationAbstract
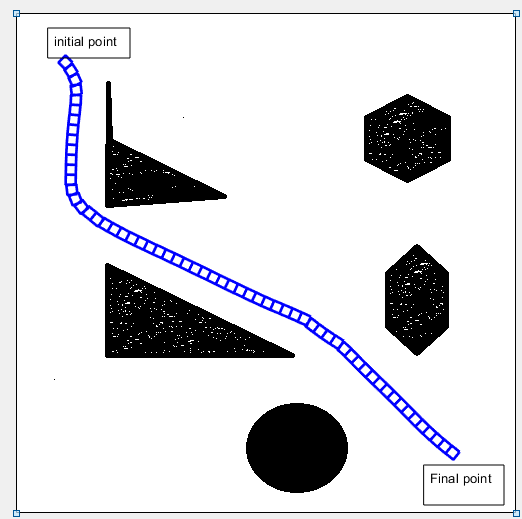
This investigation investigates the application of Adjusted Fuzzy Molecule Swarm Optimization (FPSO) to the versatile robot route issue in arrange to decide the briefest conceivable course with the least time required to travel from a beginning area to a goal area in a deterrent working zone. MPSO is being created in this ponder to progress the capability of customized calculations for a worldwide course. The proposed calculations decipher the environment outline spoken to by the framework show and develop an idea or nearly ideal collision-free way. Reenactment tests appear the viability of the most recent organized calculation for portable robot course arranging. The programs are composed in MATLAB R2019a and run on 2.65 GHz Intel Center i5 and 7 GB Smash computers. Changes proposed in MPSO and cuckoo look calculation fundamentally point to resolve the untimely merging issue related to the beginning PSO. A mistake calculate is demonstrated within the MPSO to guarantee the meeting of the PSO. FPSO points to handle another issue which is the populace may incorporate a few infeasible ways; an updated strategy is tired the FPSO to fathom the issue of the infeasible street. The discoveries illustrate that this calculation has huge potential to fathom the course arranging with satisfactory comes about in terms of decreasing remove and time for execution.
References
Chatila, R., Lacroix, S., Simeon, T., Herrb, M.: Planetary exploration by a mobile robot: mission teleprogramming and autonomous navigation. Auton. Robots 2(4), 333–344 (1995)
Singer, P.: Military robotics and ethics: a world of killer apps. Nature 477(7365), 399–401 (2011) .
Dario, P., Guglielmelli, E., Allotta, B., Carrozza, M.C.: Robotics for medical applications. IEEE Robot. Autom. Mag. 3(3), 44–56 (1996)
Ahmadi, M., Stone, P.: A multi-robot system for continuous area sweeping tasks. In: IEEE International Conference on Robotics and Automation, pp. 1724–1729. ICRA (2006)
Barraquand, J., Bruno, L., Latombe, J.-C.: Numerical potential field techniques for robot path planning. IEEE Trans. Syst. Man Cybern. 22(2), 224–241 (1992)
Willms, A.R., Yang, S.X.: An efficient dynamic system for real-time robot-path planning. IEEE Trans. Syst. Man Cybern. Part B: Cybern. 36(4), 755–766 (2006)
Bennewitz, M., Burgard, W., Thrun, S.: Finding and optimizing solvable priority schemes for decoupled path planning techniques for teams of mobile robots. Robot. Auton. Syst. 41 (2), 89–99 (2002)
Gong, D.W., Zhang, J.H., Zhang, Y.: Multi-objective particle swarm optimization for robot path planning in environment with danger sources. J. Comput. 6(8), 1554–1561 (2011)
Hao, W., Qin, S.: Multi-objective path planning for space exploration robot based on chaos immune particle swarm optimization algorithm. In: Deng, H., Miao, D., Lei, J., Wang, F.L. (eds.) AICI 2011, Part II. LNCS, vol. 7003, pp. 42–52. Springer, Heidelberg (2011)
Rakshit, P., Banerjee, D., Konar, A., Janarthanan, R.: An adaptive memetic algorithm for multi-robot path-planning. In: Panigrahi, B.K., Das, S., Suganthan, P.N., Nanda, P.K. (eds.) SEMCCO 2012. LNCS, vol. 7677, pp. 248–258. Springer, Heidelberg (2012)684 S. Sharma et al.
Ashraf, S., Budabbus, H., S.M.: Finding an optimal path planning for multiple robots using genetic algorithm. In: The 13th International Arab Conference on Information Technology, ACIT (2012.
X. Li, F. Yu, and Y. Wang, “PSO algorithm based online self-tuning of PID controller,” in 2007 International Conference on Computational Intelligence and Security (CIS 2007), 2007, pp. 128–132.
K. Ogata and Y. Yang, Modern control engineering, vol. 5. Prentice hall Upper Saddle River, NJ, 2010.
A. Cervin, D. Henriksson, and M. Ohlin, “TrueTime 2.0 beta 5-Reference Manual, Department of Automatic Control, Lund University, Sweden, June 2010. cit: 10.10. 2011.” .
Y. Wanga and L. Heb, “Analysis and Simulation of Networked Control Systems Delay Characteristics Based on Truetime,” Comput. Model. New Technol., vol. 17, no. 4, pp. 210–216, 2013.
C.-C. Song, C.-F. Feng, C.-H. Wang, and D.-C. Liaw, “Simulation and experimental analysis of a ZigBee sensor network with fault detection and reconfiguration mechanism,” in 2011 8th Asian Control Conference (ASCC), 2011, pp. 659–664.
S. Hwang and D. Yu, “Remote monitoring and controlling system based on ZigBee networks,” Int. J. Softw. Eng. Its Appl., vol. 6, no. 3, pp. 35–42, 2012.
Á. Cuenca, J. Salt, A. Sala, and R. Pizá, “A delay-dependent dual-rate PID controller over an ethernet network,” IEEE Trans. Ind. Informatics, vol. 7, no. 1, pp. 18–29, 2010.
Peng, Chen, Dong Yue, and Min-Rui Fei. "A higher energy-efficient sampling scheme for networked control systems over IEEE 802.15. 4 wireless networks." IEEE Transactions on Industrial Informatics 12.5 (2015): 1766-1774.
Dolsma, J.: Nonlinear controller design based on genetic programming. Master’s thesis, Technische Universiteit Eindhoven, Department Mechanical Engineering, Dynamics and Control Group, Eindhoven , 2007.
Floreano, D., Husbands, P., Nolfi, S.: Evolutionary Robotics, pp.1423–1451. Springer, Berlin , 2008.
Hoy, M., Matveev, A.S., Savkin, A.V.: Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. Robotica 33(3), 463–497 , 2015.
Kamel, M.E., Beji, L., Abichou, A., Mammar, S.: A novel obstacle avoidance approach for mobile robot system including target capturing. AIP Conf. Proc. 1107, 249–253 , 2009.
Minguez, J., Lamiraux, F., Laumond, J.: Motion Planning and Obstacle Avoidance, pp.827–852. Springer, Berlin , 2008.
Mohanty, P.K., Parhi, D.R.: Optimal path planning for a mobile robot using cuckoo search algorithm. J. Exp. Theor. Artif. Intell. 28(1–2), 2016, 35–52.
Prases K. Mohanty, Dayal R. Parith,” Optimal path planning for a mobile robot using cuckoo search algorithm”, Journal of experimental and theoretical artificial intelligence,2014.
Nelson, A.L., Barlow, G.J., Doitsidis, L.: Fitness functions in evolutionary robotics: a survey and analysis. Robot. Auton. Syst. 57(4), 345–370 , 2009.
Oftadeh, R., Aref, M., Ghabcheloo, R., Mattila, J.: Bounded-velocity motion control of four wheel steered mobile robots. In: 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2013, 255–260.
Štimac, G., Braut, S., žigulić, R.: Comparative analysis of PSO algorithms for PID controller tuning. Chin. J. Mech. Eng. 27(5), 2014, 928–936.
Dierks, T., Jagannathan, S.: Control of nonholonomic mobile robot formations using neural networks. In: 2007 IEEE 22nd International Symposium on Intelligent Control, 2007, 132–137.
Downloads
Published
How to Cite
Issue
Section
License
Authors who publish with this journal agree to the following terms:
- Authors retain copyright and grant the journal right of first publication with the work simultaneously licensed under a Creative Commons Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this journal.
- Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the journal's published version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial publication in this journal.
- Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See The Effect of Open Access).
This journal is based on the work at https://journal.umy.ac.id/index.php/jrc under license from Creative Commons Attribution-ShareAlike 4.0 International License. You are free to:
- Share – copy and redistribute the material in any medium or format.
- Adapt – remix, transform, and build upon the material for any purpose, even comercially.
The licensor cannot revoke these freedoms as long as you follow the license terms, which include the following:
- Attribution. You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
- ShareAlike. If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
- No additional restrictions. You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
• Creative Commons Attribution-ShareAlike (CC BY-SA)

JRC is licensed under an International License
