
Optimized Neural Networks-PID Controller with Wind Rejection Strategy for a Quad-Rotor
Abstract
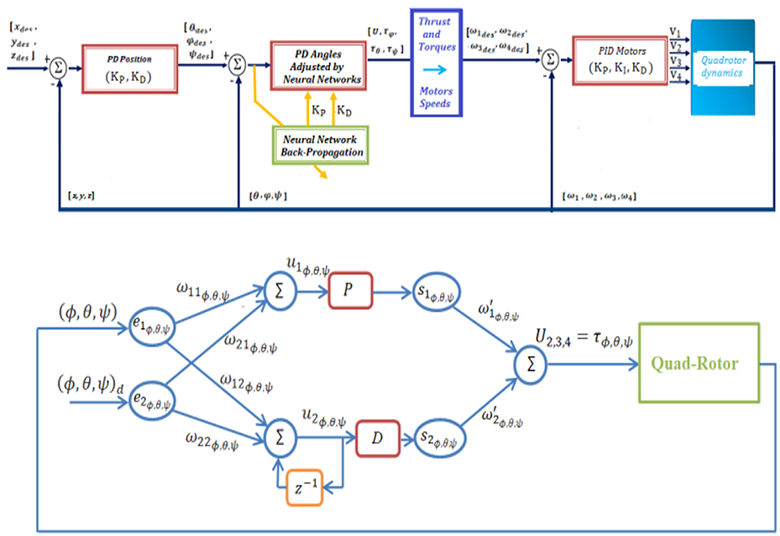
In this paper a full approach of modeling and intelligent control of a four rotor unmanned air vehicle (UAV) known as quad-rotor aircraft is presented. In fact, a PID on-line optimized Neural Networks Approach (PID-NN) is developed to be applied to angular trajectories control of a quad-rotor. Whereas, PID classical controllers are dedicated for the positions, altitude and speed control. The goal of this work is to concept a smart Self-Tuning PID controller, for attitude angles control, based on neural networks able to supervise the quad-rotor for an optimized behavior while tracking a desired trajectory. Many challenges could arise if the quad-rotor is navigating in hostile environments presenting irregular disturbances in the form of wind modeled and applied to the overall system. The quad-rotor has to quickly perform tasks while ensuring stability and accuracy and must behave rapidly with regards to decision making facing disturbances. This technique offers some advantages over conventional control methods such as PID controller. Simulation results are founded on a comparative study between PID and PID-NN controllers based on wind disturbances. These later are applied with several degrees of strength to test the quad-rotor behavior and stability. These simulation results are satisfactory and have demonstrated the effectiveness of the proposed PD-NN approach. In fact, the proposed controller has relatively smaller errors than the PD controller and has a better capability to reject disturbances. In addition, it has proven to be highly robust and efficient face to turbulences in the form of wind disturbances.
Keywords
Full Text:
PDFReferences
G. Singhal, B. Bansod, and L. Mathew, “Unmanned Aerial Vehicle Classification, Applications and Challenges: A Review,” Preprints 2018110601 (doi: 10.20944/preprints201811.0601.v1) 2018.
J. Ajmera and V. Sankaranarayanan, “Trajectory tracking control of a quad-rotor,” 2015 International Conference on Control Communication & Computing India (ICCC), Trivandrum, 2015, pp. 48-53, doi: 10.1109/ICCC.2015.7432868.
C. Wang, W. Liu and M. Q. Meng, “Obstacle avoidance for quad-rotor using improved method based on optical flow,” 2015 IEEE International Conference on Information and Automation, Lijiang, 2015, pp. 1674-1679, doi: 10.1109/ICInfA.2015.7279555.
T. Üstünkök and M. Karakaya, “Effect of PSO Tuned P, PD, and PID Controllers on the Stability of a Quad-rotor,” 2019 1st International Informatics and Software Engineering Conference (UBMYK), Ankara, Turkey, 2019, pp. 1-6, doi: 10.1109/UBMYK48245.2019.8965487.
J. J. Castillo-Zamora, K. A. Camarillo-GóMez, G. I. PéRez-Soto and J. RodríGuez-ReséNdiz, “Comparison of PD, PID and Sliding-Mode Position Controllers for V–Tail Quadcopter Stability,” in IEEE Access, vol. 6, pp. 38086-38096, 2018, doi: 10.1109/ACCESS.2018.2851223.
H. S. Khan and M. B. Kadri, “Attitude and altitude control of quad-rotor by discrete PID control and non-linear model predictive control,” 2015 International Conference on Information and Communication Technologies (ICICT), Karachi, 2015, pp. 1-11, doi: 10.1109/ICICT.2015.7469486.
H. Liu and G. Gao, “Dynamic modeling and analyzing for a novel X-quad-rotor,” 2017 3rd International Conference on Computational Intelligence & Communication Technology (CICT), Ghaziabad, 2017, pp. 1-4, doi: 10.1109/CIACT.2017.7977292.
K. El Hamid, M. Mjahed, A. El Kari and H. Ayad, “Neural and Fuzzy Based Nonlinear Flight Control for an Unmanned Quad-rotor,” International Review of Automatic Control (IREACO), vol. 11, no. 3, 2018.
O. Doukhi, A. Fayjie and D.J. Lee, “Intelligent Controller Design for Quad-Rotor Stabilization in Presence of Parameter variations,” Journal of Advanced Transportation, Vol. 2017, Article ID 4683912, 10 pages.
M. Algabri, et al., “Wireless vision-based fuzzy controllers for moving object tracking using a quad-rotor,” International Journal of Distributed Sensor Networks, vol. 13, no. 4, 2017.
H.Housny, E.Chater and H. ElFadil, “Fuzzy PID Control Tuning Design Using Particle Swarm Optimization Algorithm for a Quad-rotor,” IEEE 5th International Conference on Optimization and Applications (ICOA), 2019.
J. Xu, Y. Ma and J. Huang, "3D Path Tracking Controller Based on Fuzzy PID Optimized by PSO for Quad-rotor," 2019 Chinese Automation Congress (CAC), Hangzhou, China, 2019, pp. 3522-3527, doi: 10.1109/CAC48633.2019.8997208.
T. Liu, Y. Chen, Z. Chen, H. Wu and L. Cheng, "Adaptive fuzzy fractional order PID control for 6-DOF quad-rotor," 2020 39th Chinese Control Conference (CCC), Shenyang, China, 2020, pp. 2158-2163, doi: 10.23919/CCC50068.2020.9188677.
S. Bari, S. S. Zehra Hamdani, H. U. Khan, M. u. Rehman and H. Khan, "Artificial Neural Network Based Self-Tuned PID Controller for Flight Control of Quadcopter," 2019 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 2019, pp. 1-5, doi: 10.1109/CEET1.2019.8711864.
M. Fatan, B. L. Sefidgari and A. V. Barenji, "An adaptive neuro PID for controlling the altitude of quadcopter robot," 2013 18th International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, 2013, pp. 662-665, doi: 10.1109/MMAR.2013.6669989.
S. Furukawa, S. Kondo, A. Takanishi and H. Lim, "Radial basis function neural network based PID control for quad-rotor flying robot," 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, 2017, pp. 580-584, doi: 10.23919/ICCAS.2017.8204300.
A. Katiar, R. Rashdi, Z. Ali and U. Baig, "Control and stability analysis of quadcopter," 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, 2018, pp. 1-6, doi: 10.1109/ICOMET.2018.8346419.
R. Lopez, I. González-Hernández, S. Salazar, A. E. Rodriguez, J. J. Ordaz and A. Osorio, “Disturbance rejection for a Quadrotor aircraft through a robust control,” 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, 2015, pp. 409-415, doi: 10.1109/ICUAS.2015.7152317.
H. C. T. E. Fernando, A. T. A. De Silva, M. D. C. De Zoysa, K. A. D. C. Dilshan and S. R. Munasinghe, “Modelling, simulation and implementation of a quad-rotor UAV,” 2013 IEEE 8th International Conference on Industrial and Information Systems, Peradeniya, 2013, pp. 207-212, doi: 10.1109/ICIInfS.2013.6731982.
G. Jithu and P. R. Jayasree, "Quad-rotor modelling and control," 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, 2016, pp. 1167-1172, doi: 10.1109/ICEEOT.2016.7754868.
M. Walid, N. Slaheddine, A. Mohamed and B. Lamjed, "Modelling, Identification and Control of a Quad-rotor UAV," 2018 15th International Multi-Conference on Systems, Signals & Devices (SSD), Hammamet, 2018, pp. 1017-1022, doi: 10.1109/SSD.2018.8570512.
M. Ardema, “Newton-Euler Dynamics,” Springer Science and Business Media, Inc, 2005.
Y. Chen, Y. He and M. Zhou, “Decentralized PID neural network control for a quad-rotor helicopter subjected to wind disturbance,” Journal of Central South University, Vol. 22, No. 1, pp. 168-179, 2015.
L. Ding and Z. Wang, “A Robust Control for an Aerial Robot Quad-rotor under Wind Gusts,” Journal of Robotics, Vol. 2018, pp. 1-8, 2018.
G. Perozzi, D. Efimov, J. Biannic, L. Planckaert and P. Coton, "Wind estimation algorithm for quad-rotors using detailed aerodynamic coefficients," 2018 Annual American Control Conference (ACC), Milwaukee, WI, 2018, pp. 1921-1926, doi: 10.23919/ACC.2018.8431879.
Y. Guo, B. Jiang and Y. Zhang, “A novel robust attitude control for quad-rotor aircraft subject to actuator faults and wind gusts,” IEEE/CAA Journal of Automatica Sinica, Vol. 5, No. 1, pp. 292-300, 2018.
R. T. Palomaki, N. T. Rose, M. van den Bossche, T. J. Sherman, and S. F. J. De Wekker, “Wind estimation in the lower atmosphere using multirotor aircraft,” J. Atmos. Ocean. Technol., vol. 34, no. 5, pp. 1183–1191, May 2017.
Z. He and L. Zhao, “A Simple Attitude Control of Quad-rotor Helicopter Based on Ziegler-Nichols Rules for Tuning PD Parameters,” The Scientific World Journal, Vol. 2014, Article ID 280180, 13 pages, 2014.
K. J. Astrom and T. Hagglund, “Revisiting the Ziegler–Nichols step response method for PID control,” Elsevier, Journal of Process Control, Vol. 14, pp. 635 – 650, 2004.
DOI: https://doi.org/10.18196/jrc.v3i1.11660
Refbacks
- There are currently no refbacks.
Copyright (c) 2021 chiraz ben jabeur

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
Journal of Robotics and Control (JRC)
P-ISSN: 2715-5056 || E-ISSN: 2715-5072
Organized by Peneliti Teknologi Teknik Indonesia
Published by Universitas Muhammadiyah Yogyakarta in collaboration with Peneliti Teknologi Teknik Indonesia, Indonesia and the Department of Electrical Engineering
Website: http://journal.umy.ac.id/index.php/jrc
Email: jrcofumy@gmail.com